Deep Learning: Deep Discriminative Neural Networks
Here is my Deep Learning Full Tutorial!
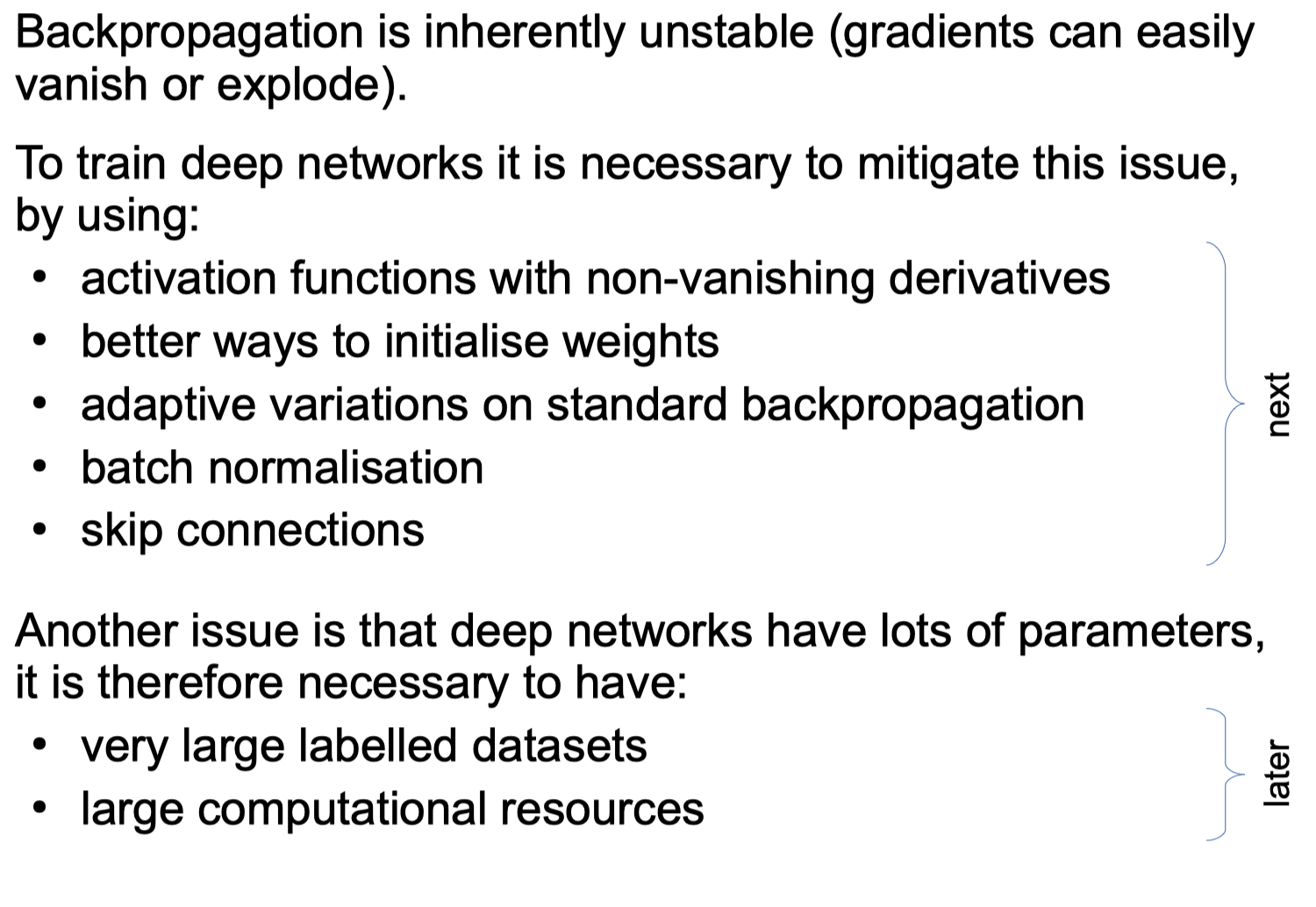
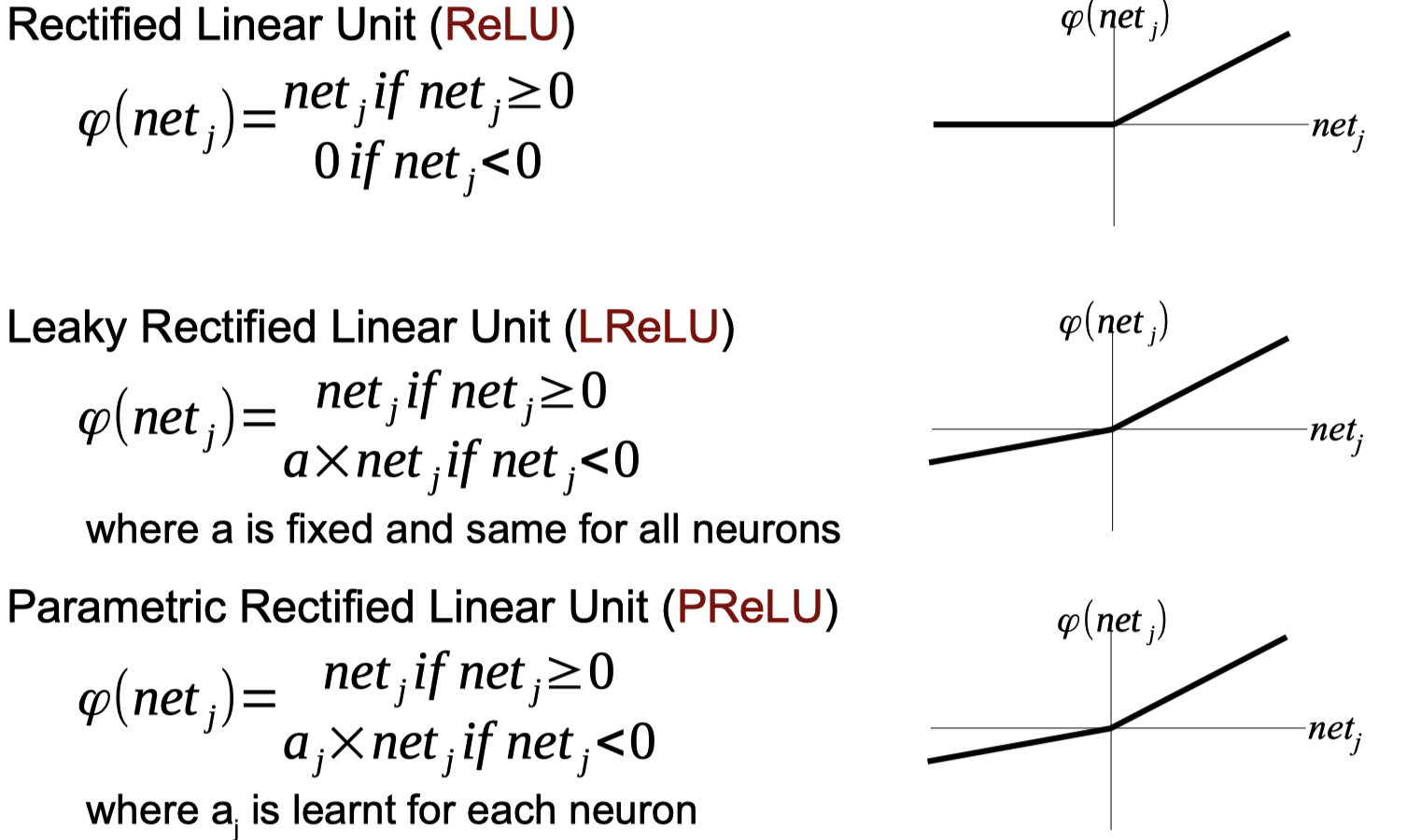
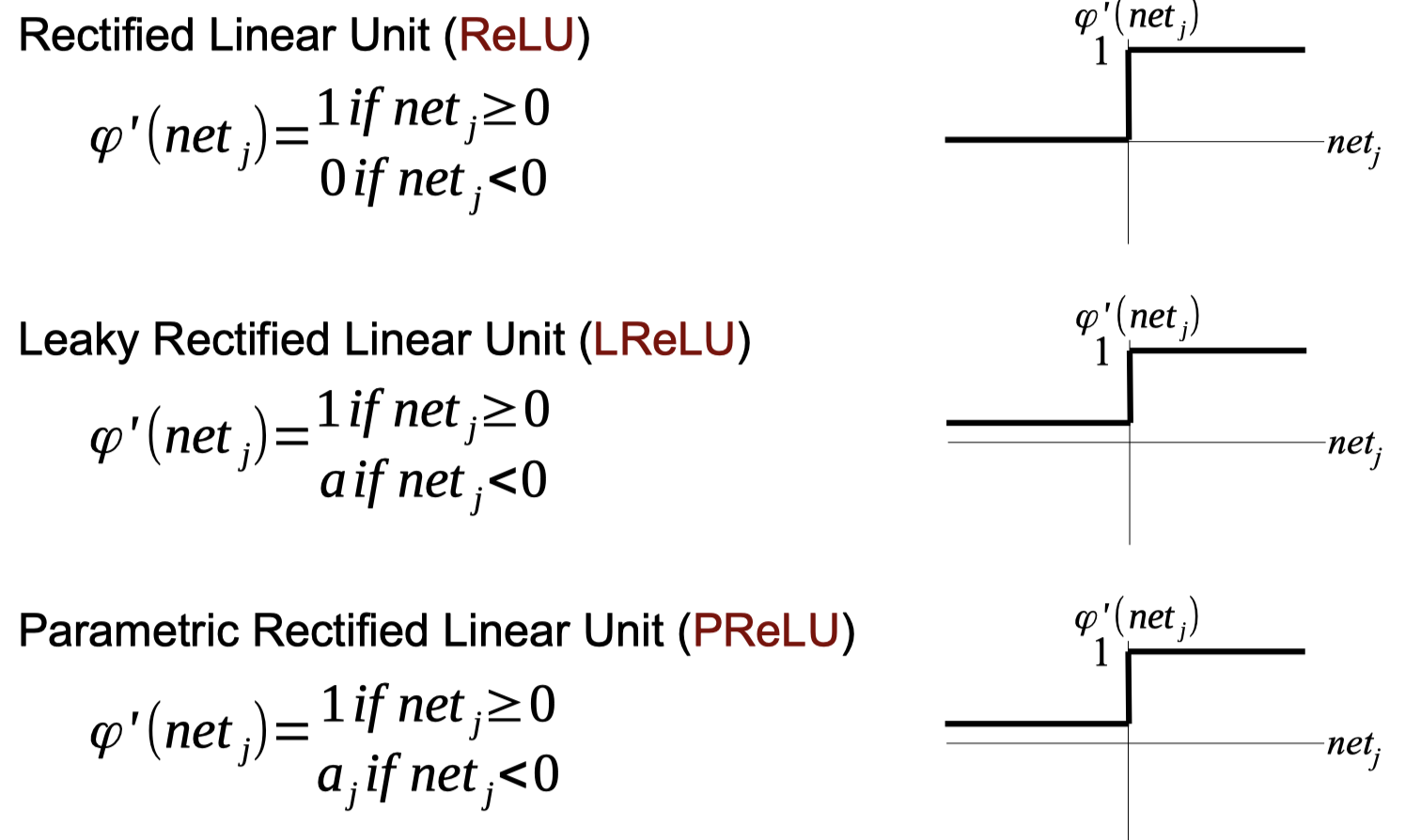
Activation Functions with Non-Vanishing Derivatives
Activate Functions Python code
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
# Activate Functions
import numpy as np
def relu(input):
return (np.abs(input) + input)/2
def l_relu(input):
return np.where(input > 0, input, input * 0.1)
def tanh(input):
ex = np.exp(input)
enx = np.exp(-input)
return (ex - enx) / (ex + enx)
def d_tanh(input):
# 4e^(-2x)/(1+e^(-2x))^2
return 4*np.exp(-2*input)/((1+np.exp(-2*input))*(1+np.exp(-2*input)))
def heaviside(input):
threshold = 0.1
return np.heaviside(input-threshold,0.5)
net = [[1,0.5,0.2],[-1,-0.5,-0.2],[0.1,-0.1,0]]
print(heaviside(np.array(net)))
Output
1
2
3
[[1. 1. 1. ]
[0. 0. 0. ]
[0.5 0. 0. ]]
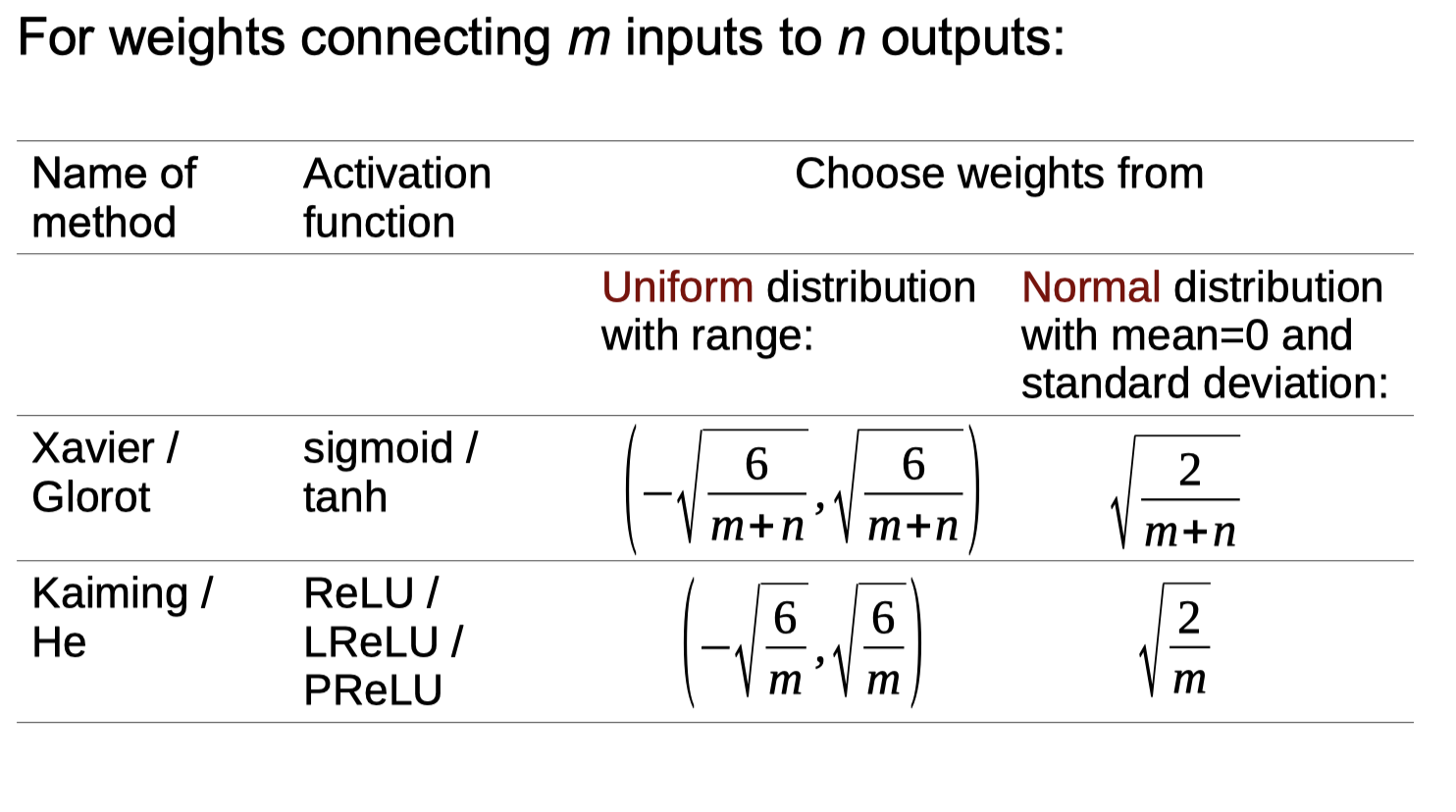
Better Ways to Initialise Weights
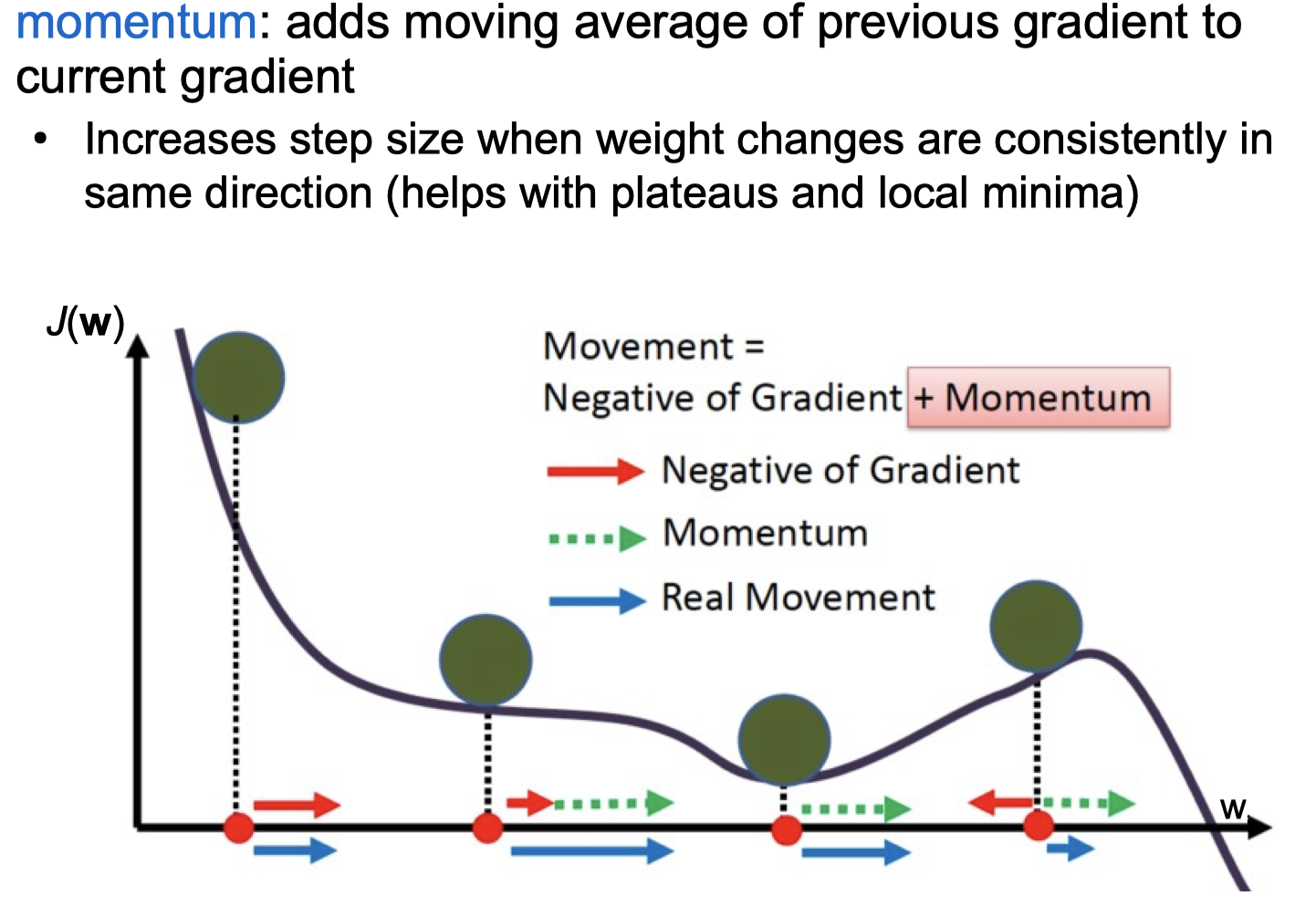
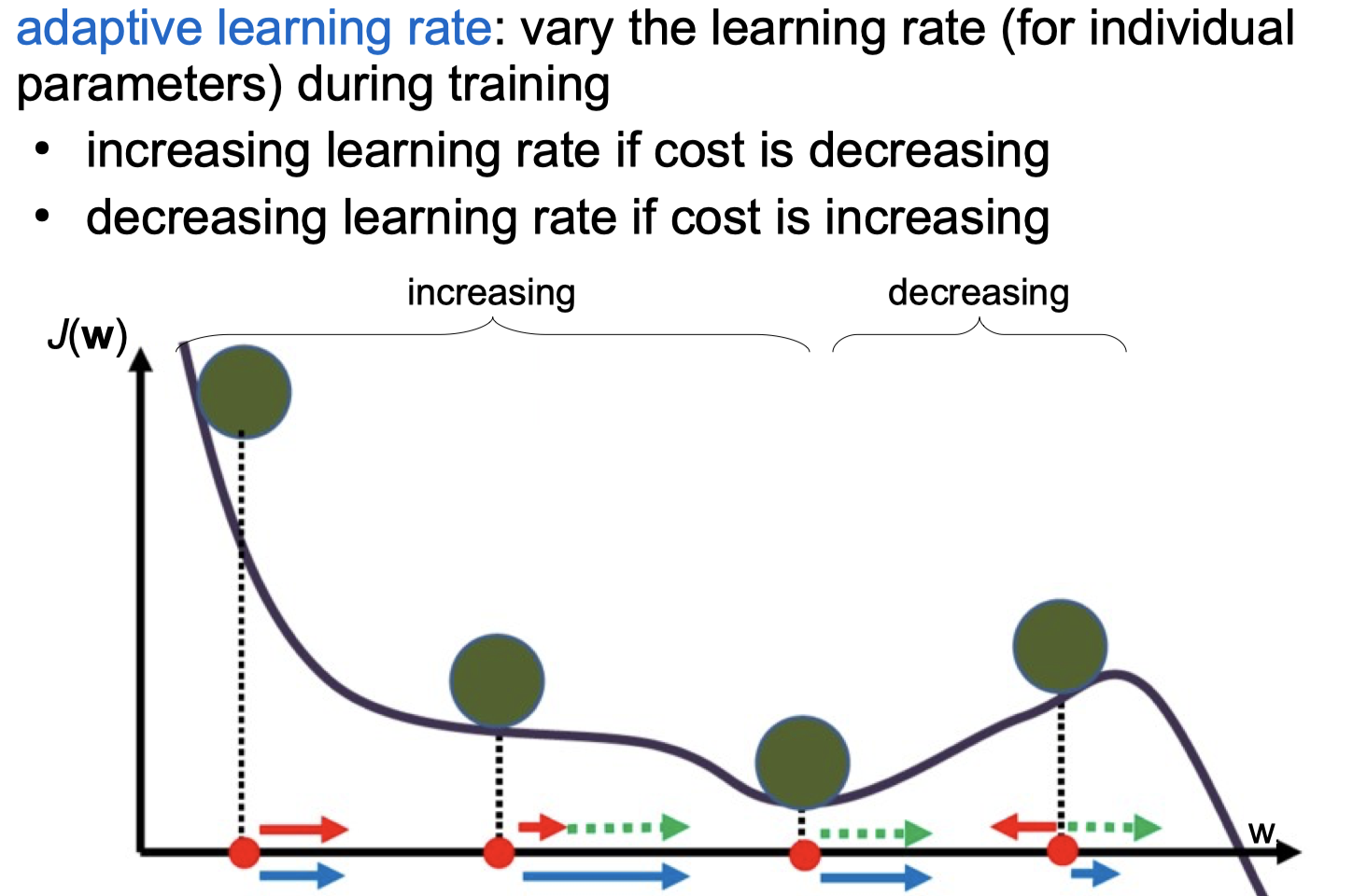
Adaptive Versions of Backpropagation
Batch Normalisation
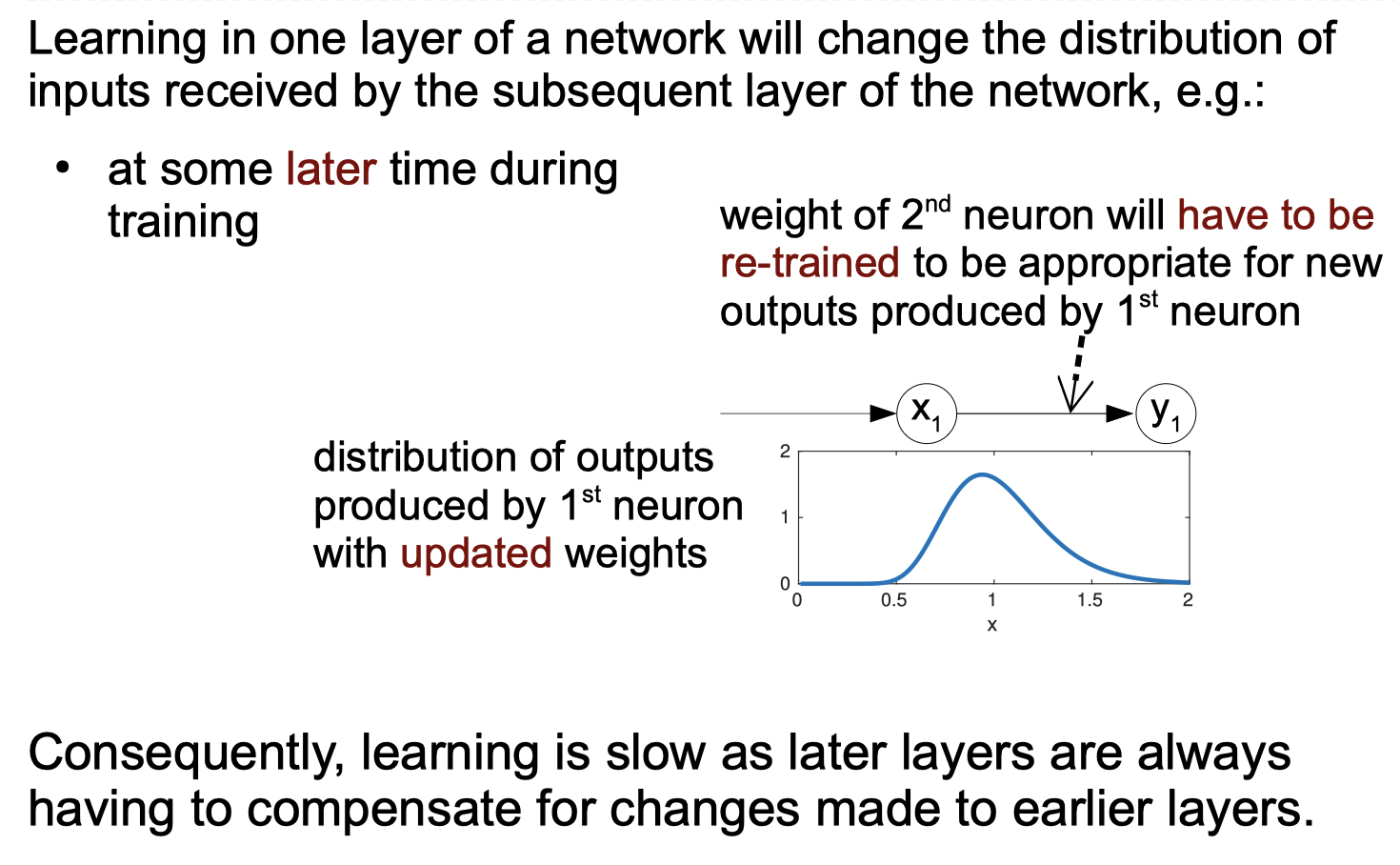
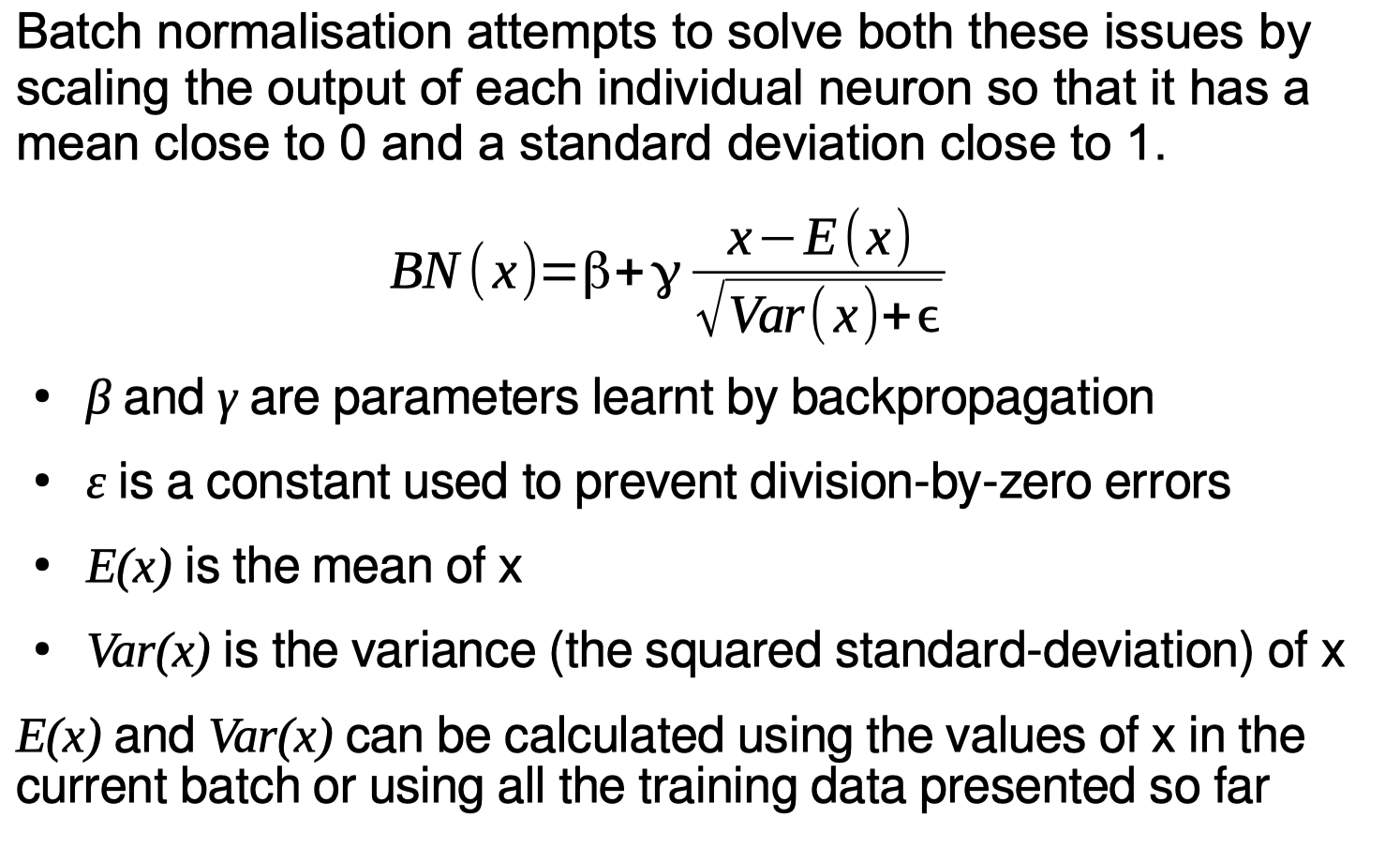
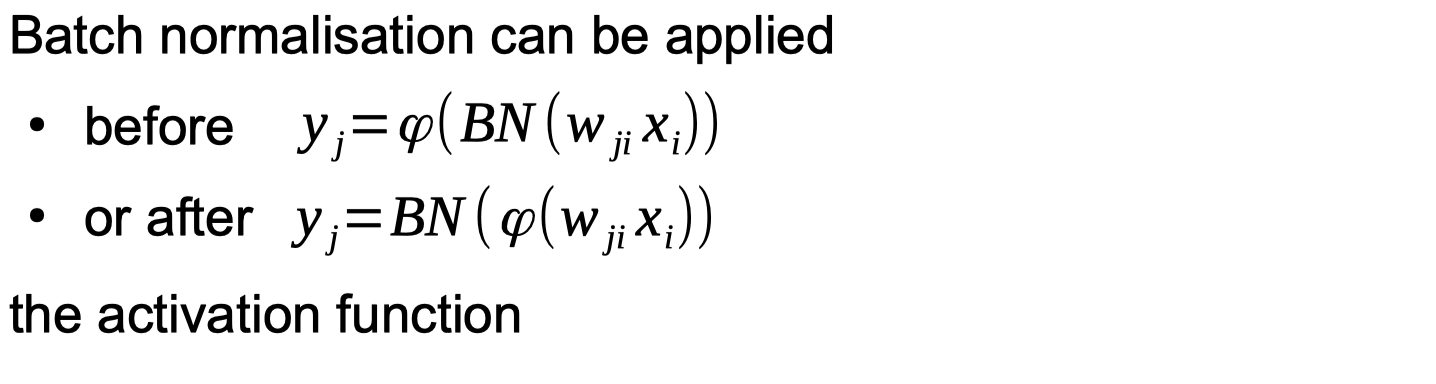
Batch normalisation
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
# Batch normalisation
X = [
[[-0.3,-0.3,-0.8],[0.7,0.6,0.5],[-0.4,0.2,-0.3]],
[[-0.5,0.1,0.8],[-0.5,-0.6,0],[0.7,-0.5,0.6]],
[[0.8,-0.2,0.7],[0.4,0.0,0.0],[0.0,0.1,-0.6]]
]
def batch_normal(input):
input = np.array(input)
# β = 0
a = 0.1
# γ = 1
b = 0.4
# ε = 0.1
c = 0.2
(m,n) = np.shape(input[0])
for x in range(m):
for y in range(n):
temp = np.copy(input[:,x,y])
for i in range(len(input)):
# the function
input[i,x,y] = a + b*(temp[i] - np.mean(temp))/(np.sqrt(np.var(temp)+c))
return input
print(np.round(batch_normal(X),4))
Output
1
2
3
4
5
6
7
8
9
10
11
[[[-0.0654 -0.0393 -0.3819]
[ 0.3949 0.4618 0.3638]
[-0.2136 0.2962 -0.018 ]]
[[-0.1756 0.2951 0.3643]
[-0.3128 -0.2618 -0.0319]
[ 0.4764 -0.2188 0.5128]]
[[ 0.5409 0.0443 0.3177]
[ 0.218 0.1 -0.0319]
[ 0.0373 0.2226 -0.1949]]]
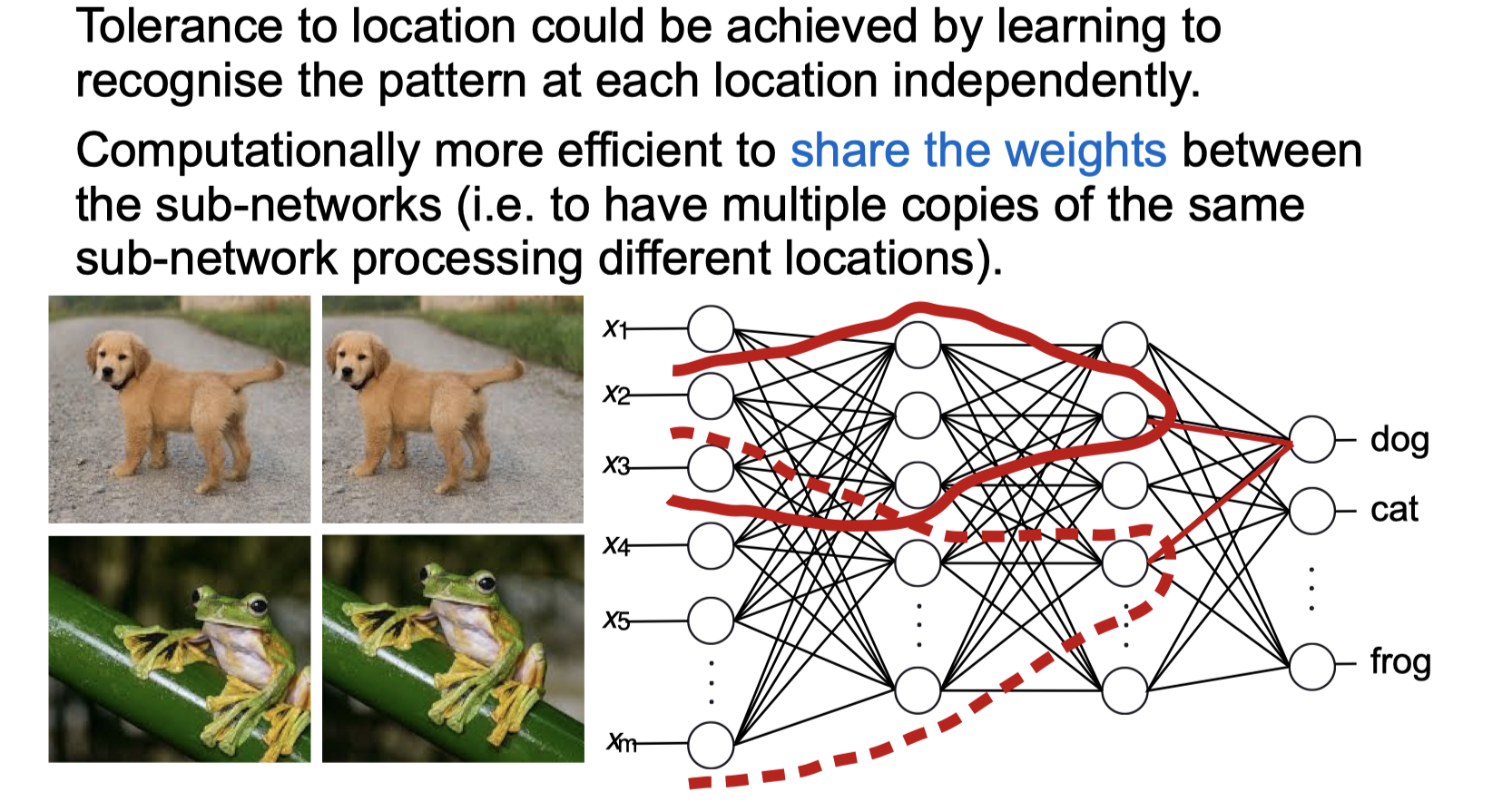
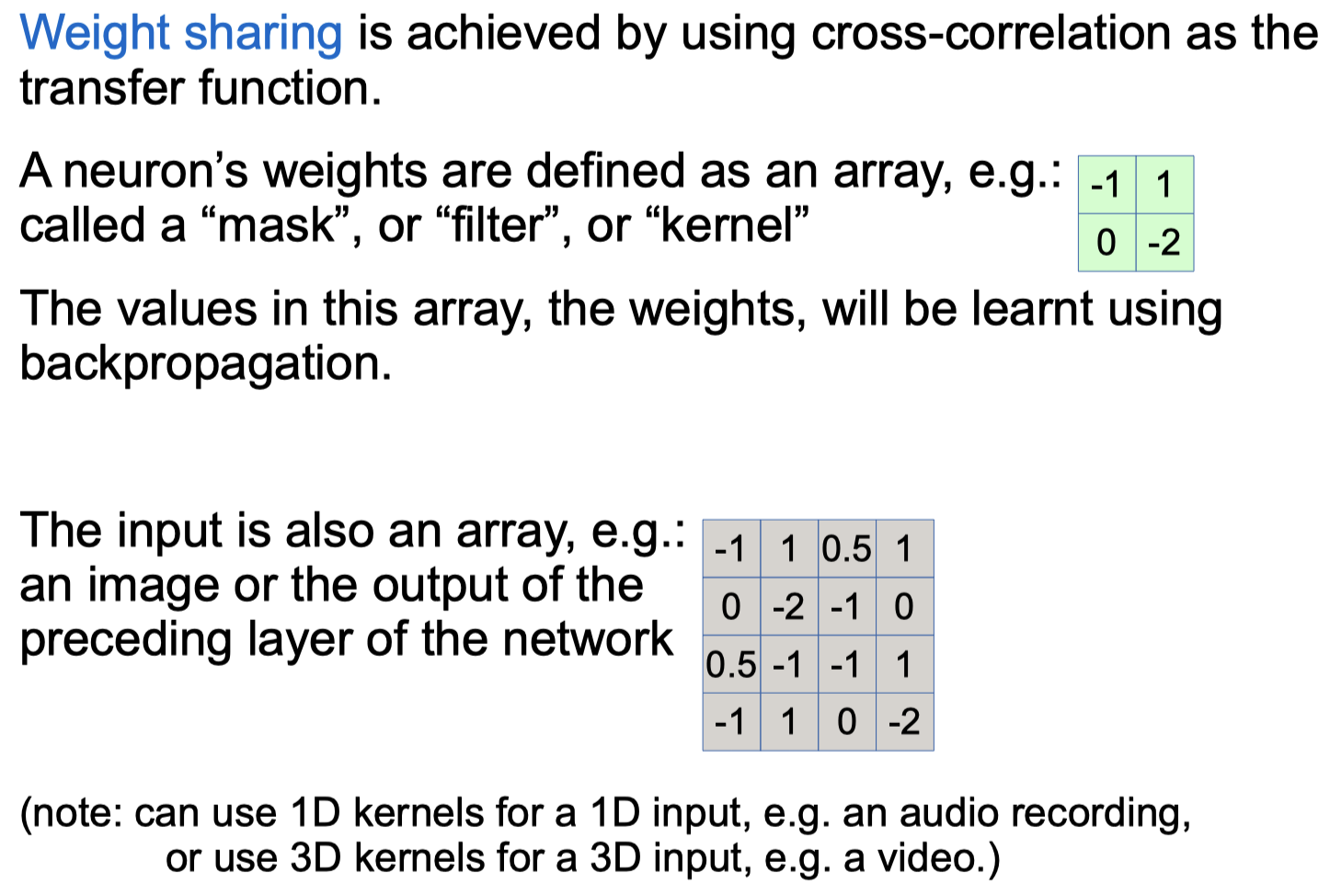
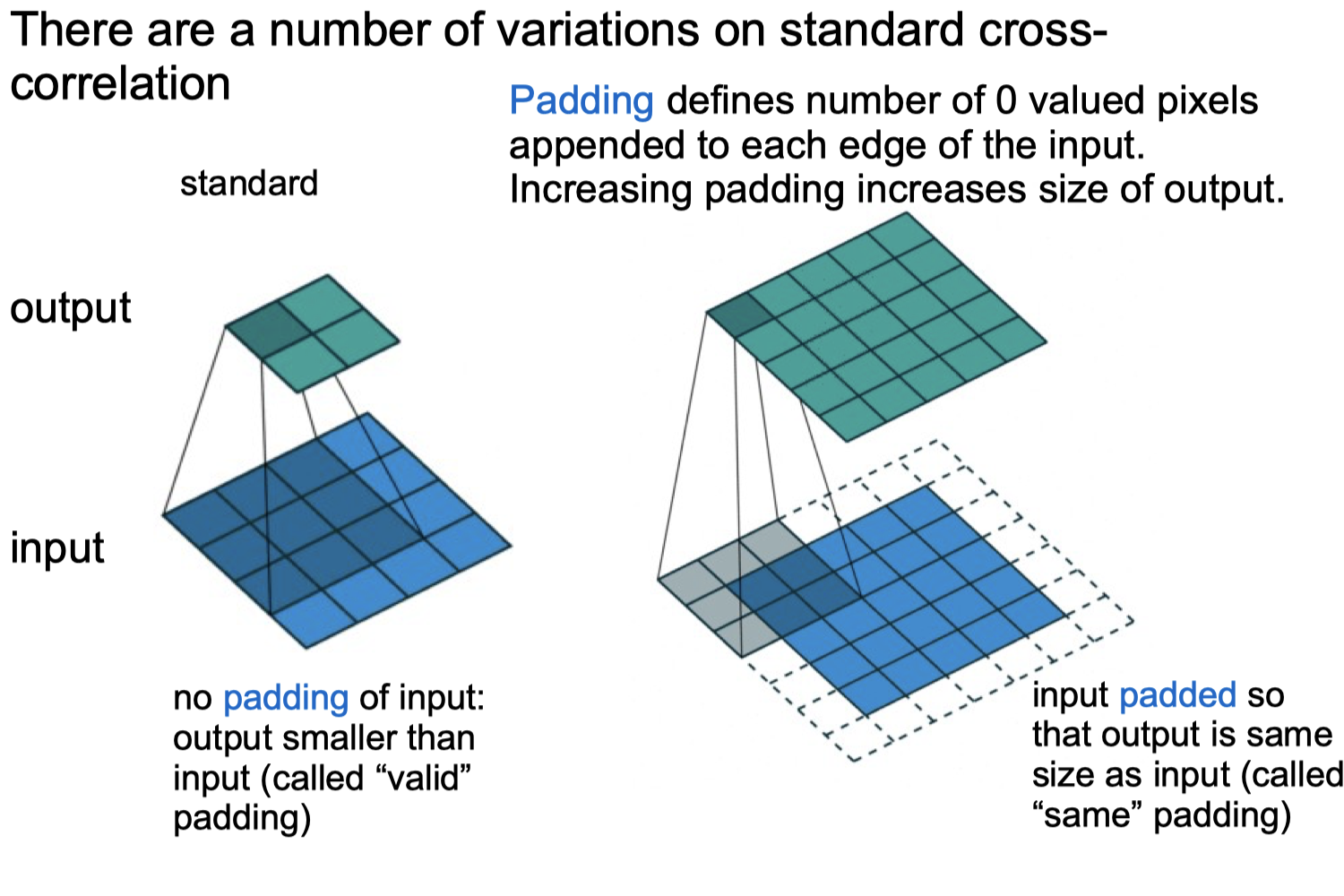
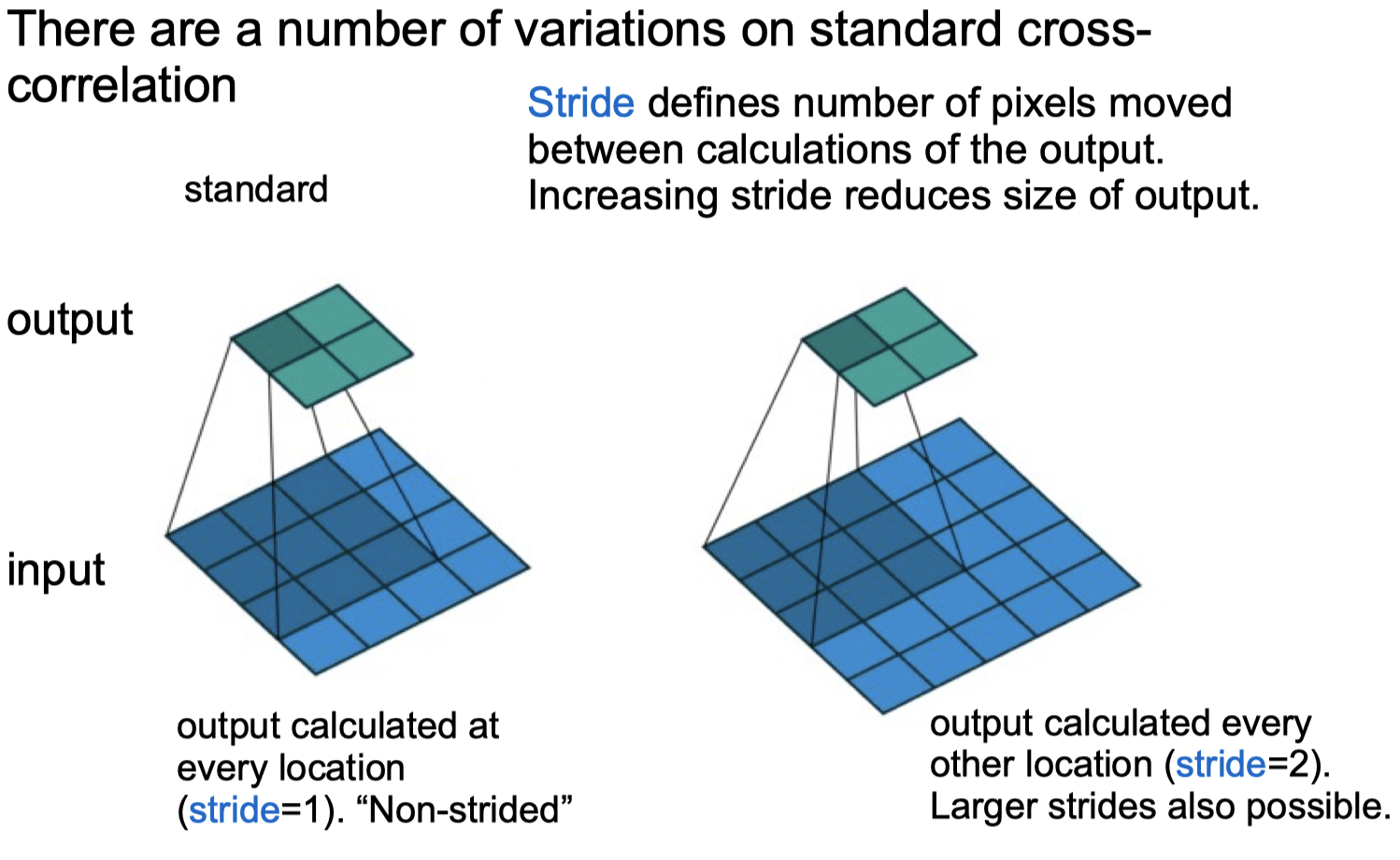
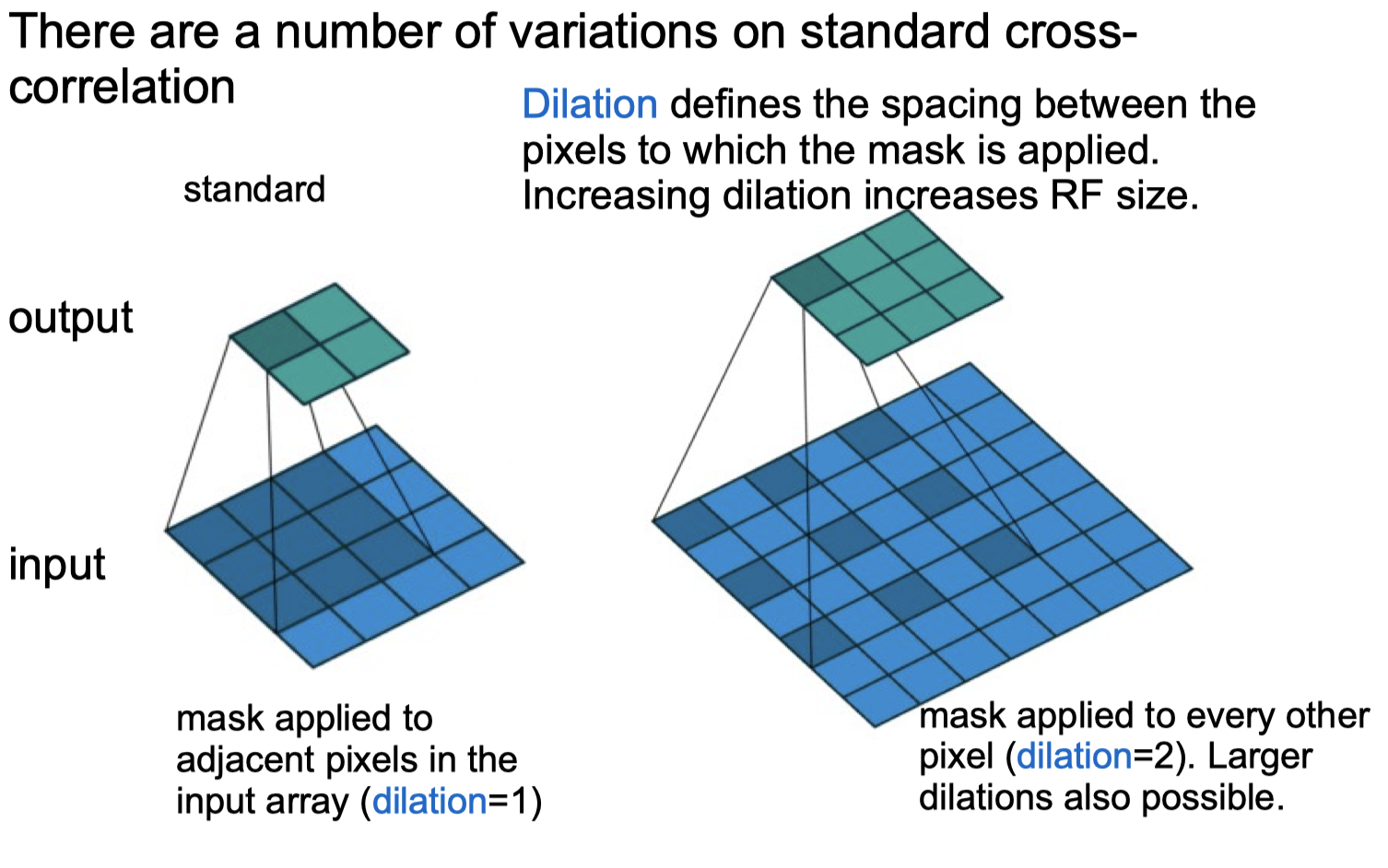
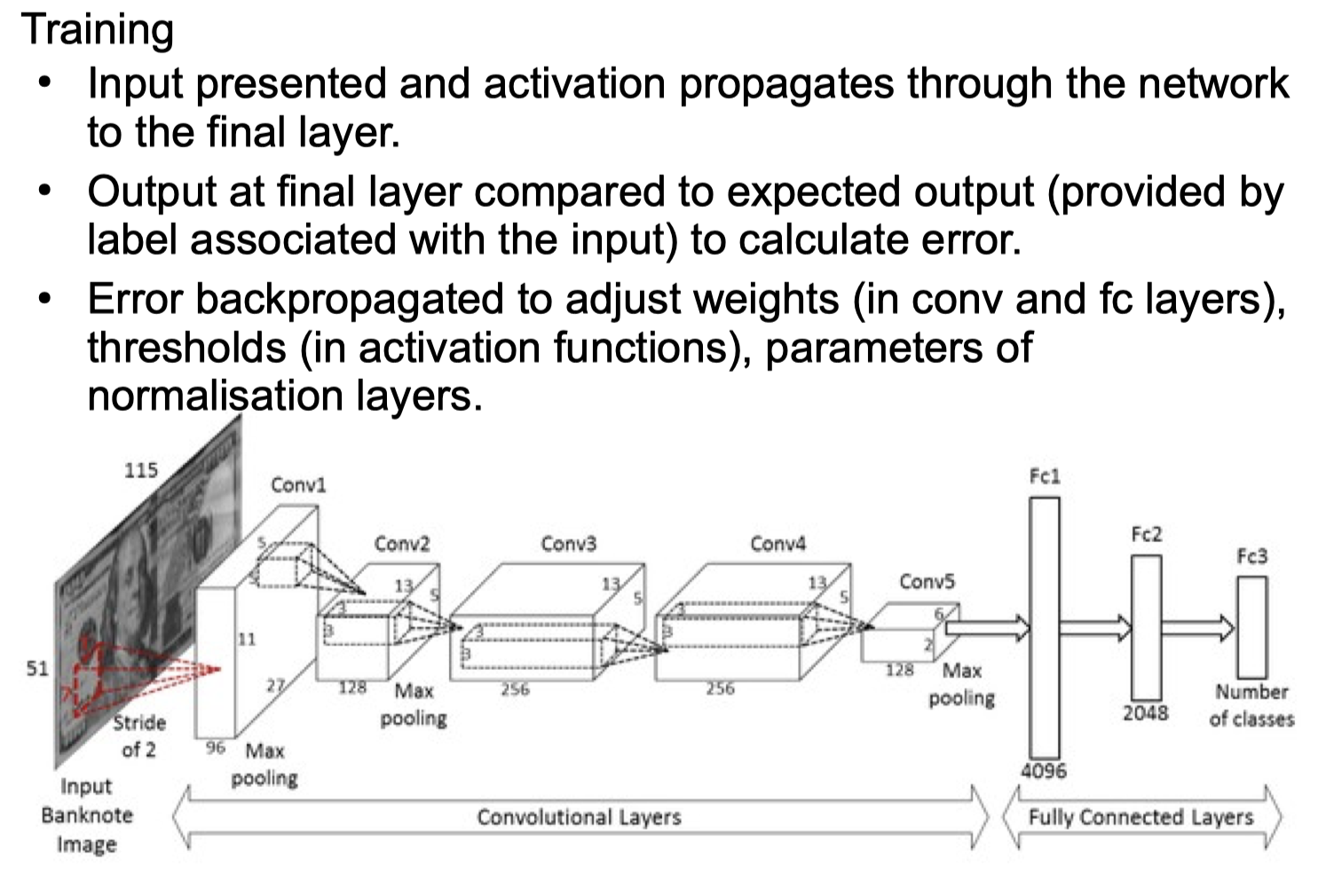
Convolutional Neural Networks
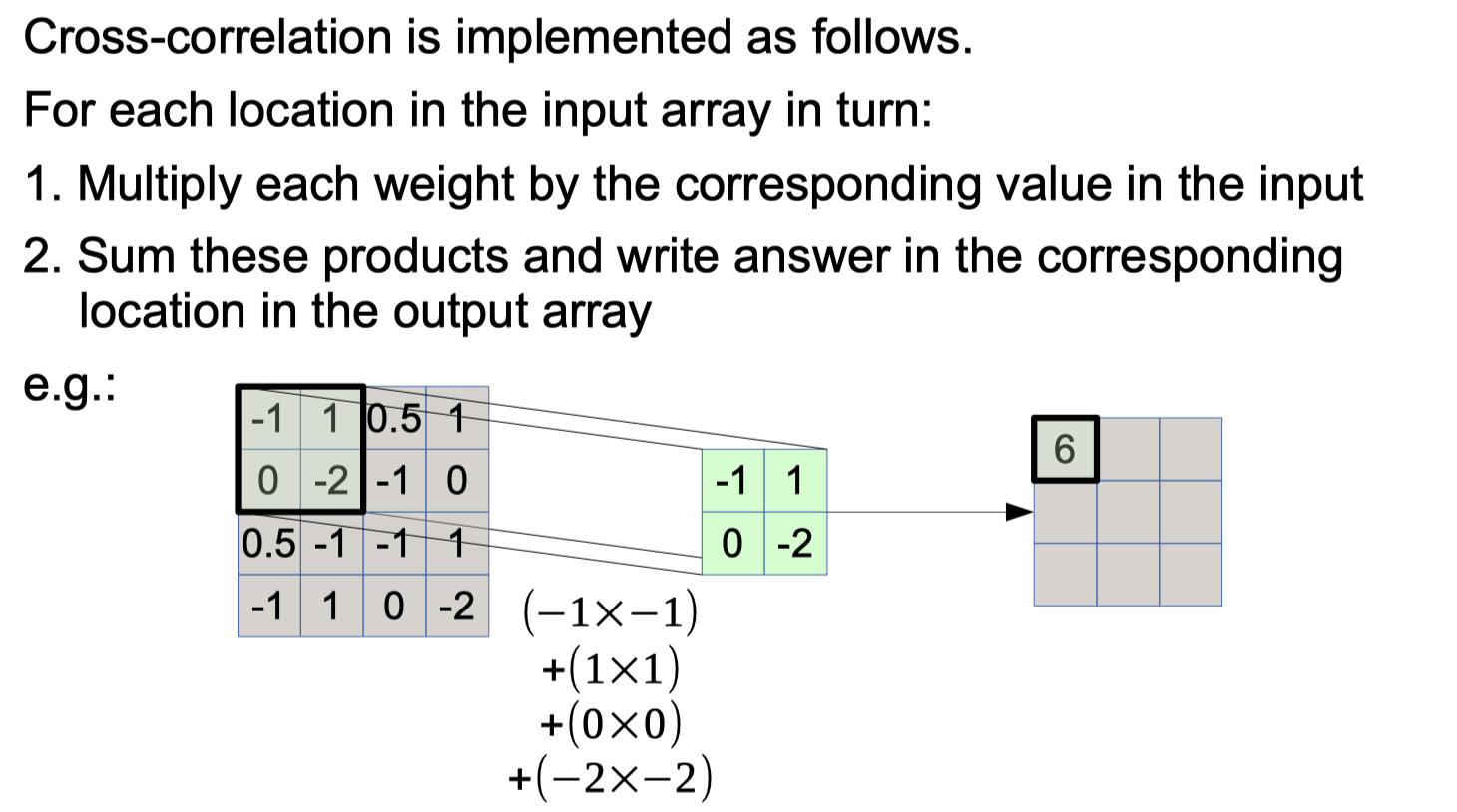
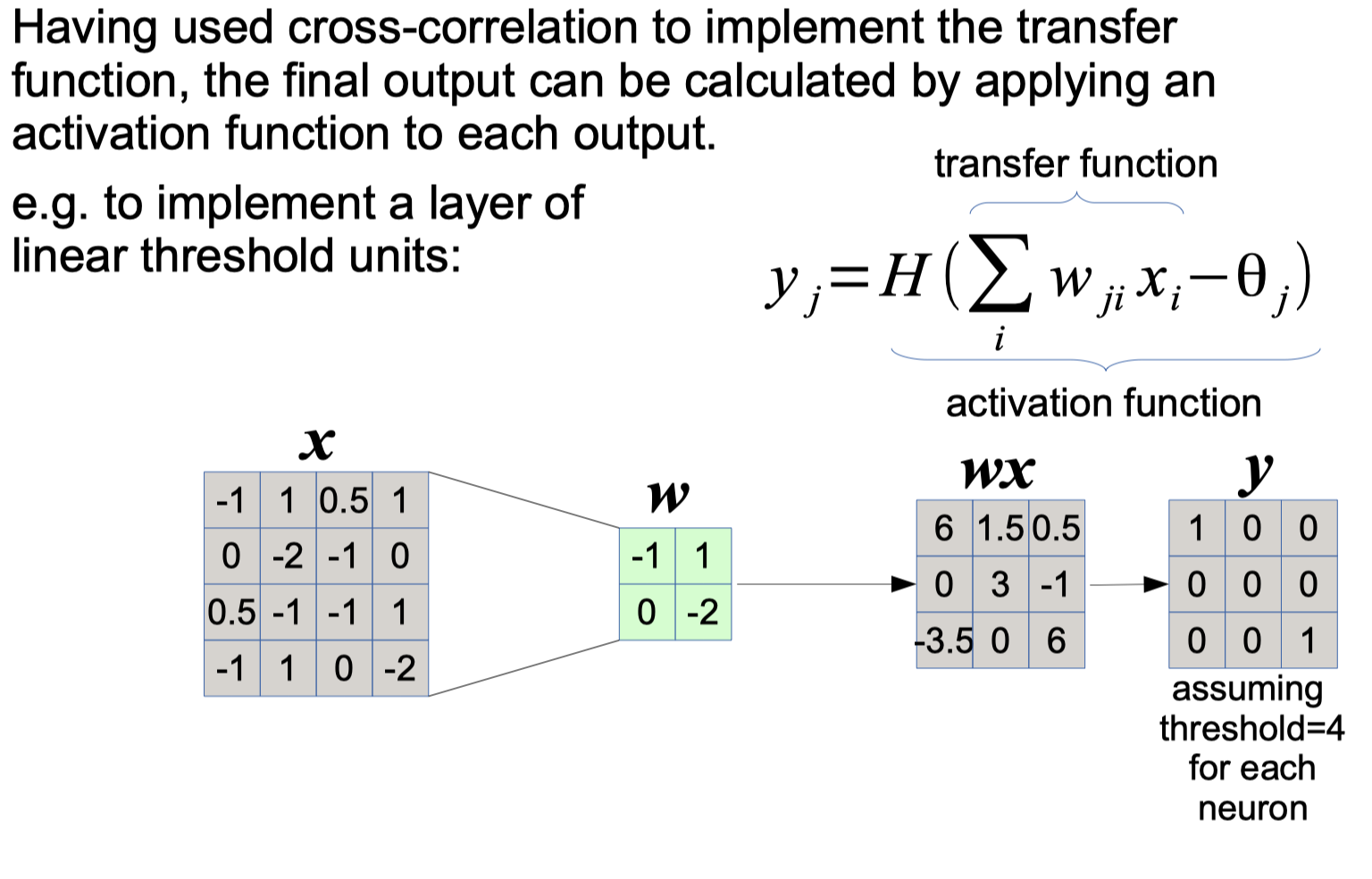
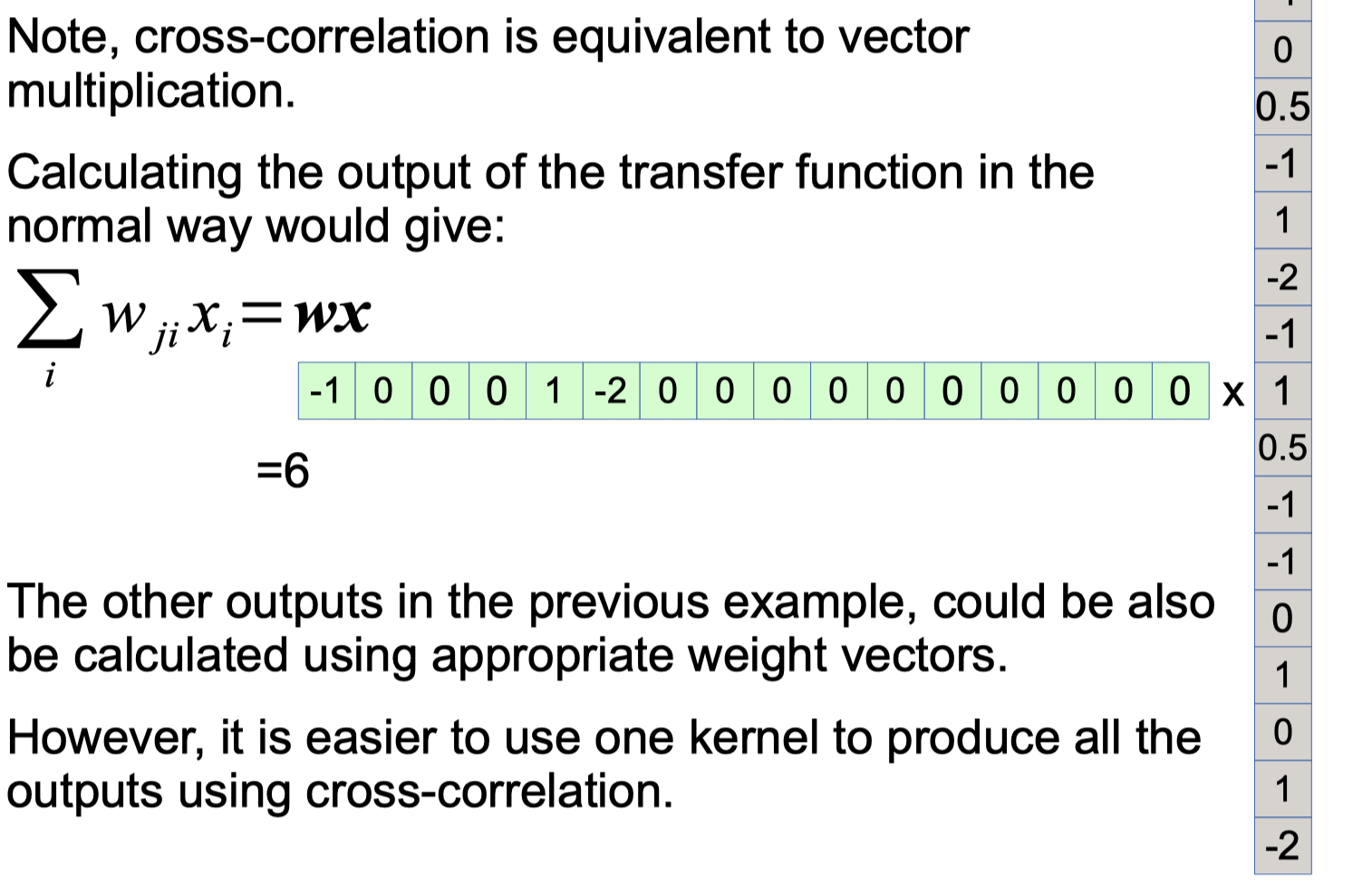
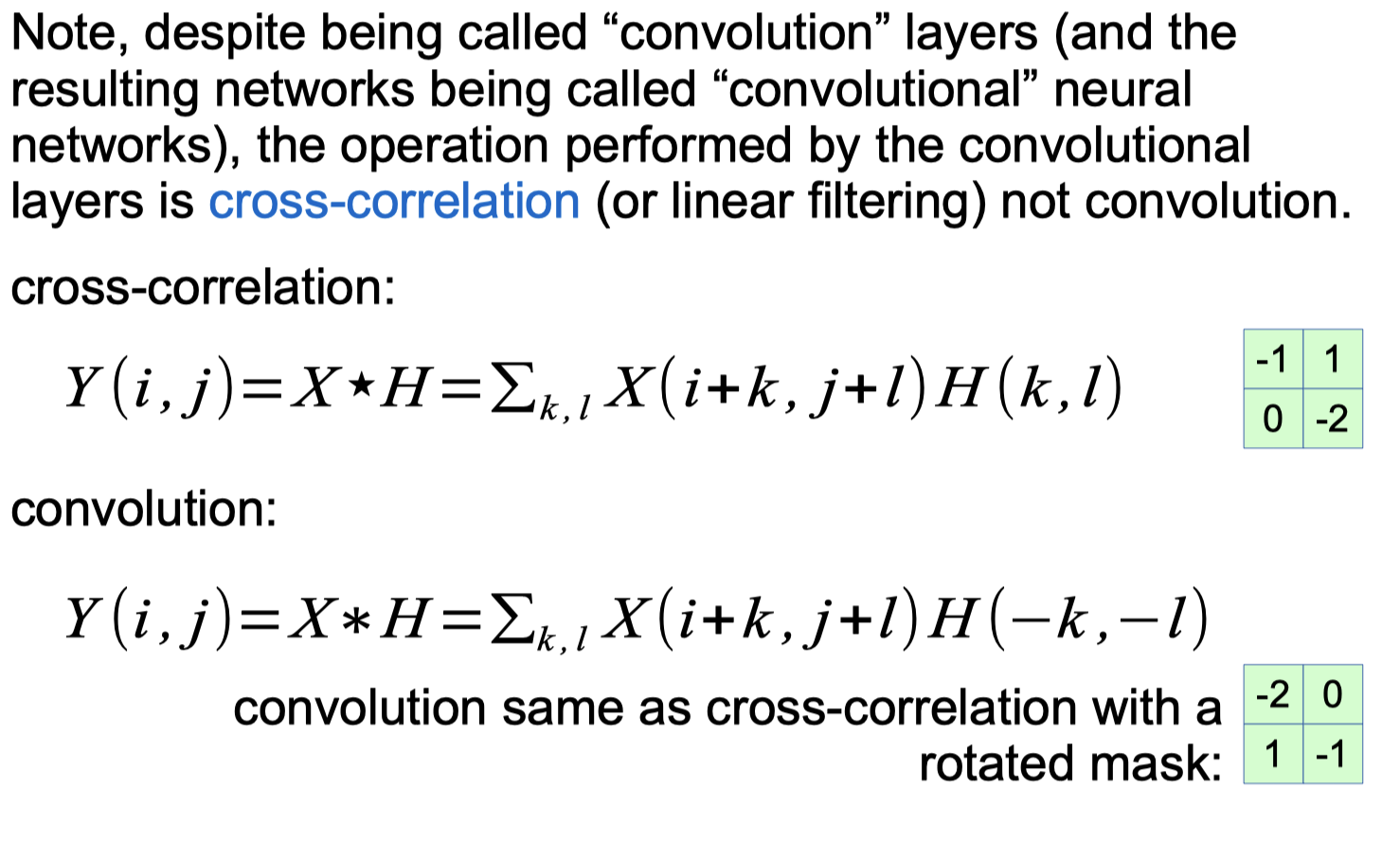
Convolutional Neural Networks Forward python code
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
# Convolutional Neural Networks Forward
import torch
X = [
[[0.2,1,0],
[-1,0,-0.1],
[0.1,0,0.1]],
[[1,0.5,0.2],
[-1,-0.5,-0.2],
[0.1,-0.1,0]]
]
H = [
[[1,-0.1],
[1,-0.1]],
[[0.5,0.5],
[-0.5,-0.5]]
]
x = torch.tensor([X])
y = torch.tensor([H])
print(torch.nn.functional.conv2d(x,y,stride=1,padding=0, dilation=1))
Output
1
2
tensor([[[[ 0.6000, 1.7100],
[-1.6500, -0.3000]]]])
CNN output dimension
1
2
3
4
5
6
7
inputDim = 200
maskDim = 5
padding = 0
stride = 1
chanel = 40
outputDim = 1 + (inputDim - maskDim + 2*padding)/stride
print('Dimension:',outputDim,'x',outputDim,'x',chanel)
Output
1
Dimension: 196.0 x 196.0 x 40
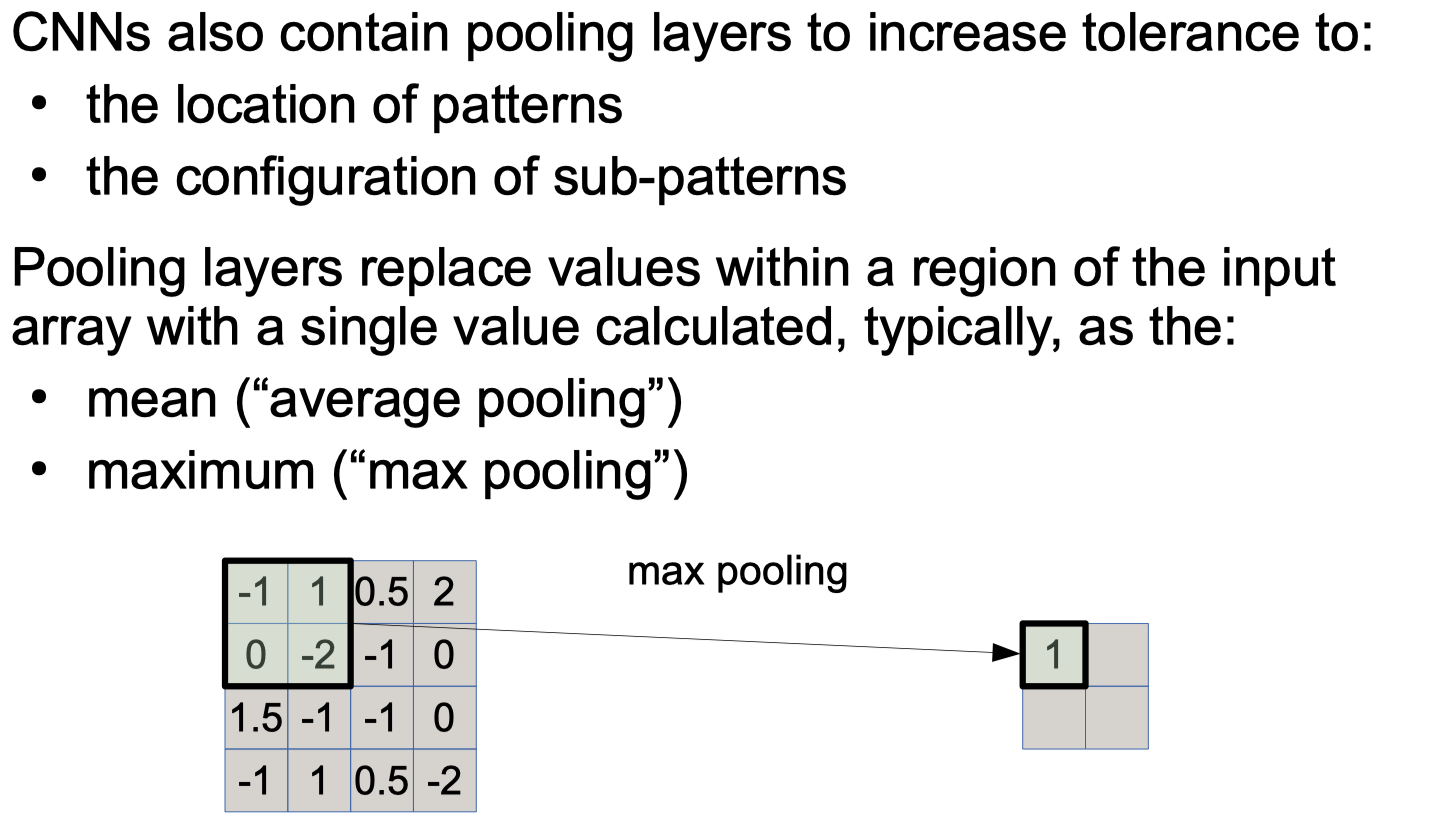
Pooling Layers
avg pooling, max pooling python code
1
2
3
4
5
# avg pooling, max pooling
X = [[0.2,1,0,0.4],[-1,0,-0.1,-0.1],[0.1,0,-1,-0.5],[0.4,-0.7,-0.5,1]]
x = torch.tensor([[X]])
print(torch.nn.functional.avg_pool2d(x,kernel_size =[2,2],stride=2,padding=0))
print(torch.nn.functional.max_pool2d(x,kernel_size =[3,3],stride=1,padding=0))
Output
1
2
3
4
tensor([[[[ 0.0500, 0.0500],
[-0.0500, -0.2500]]]])
tensor([[[[1.0000, 1.0000],
[0.4000, 1.0000]]]])
Fully Connected Layers
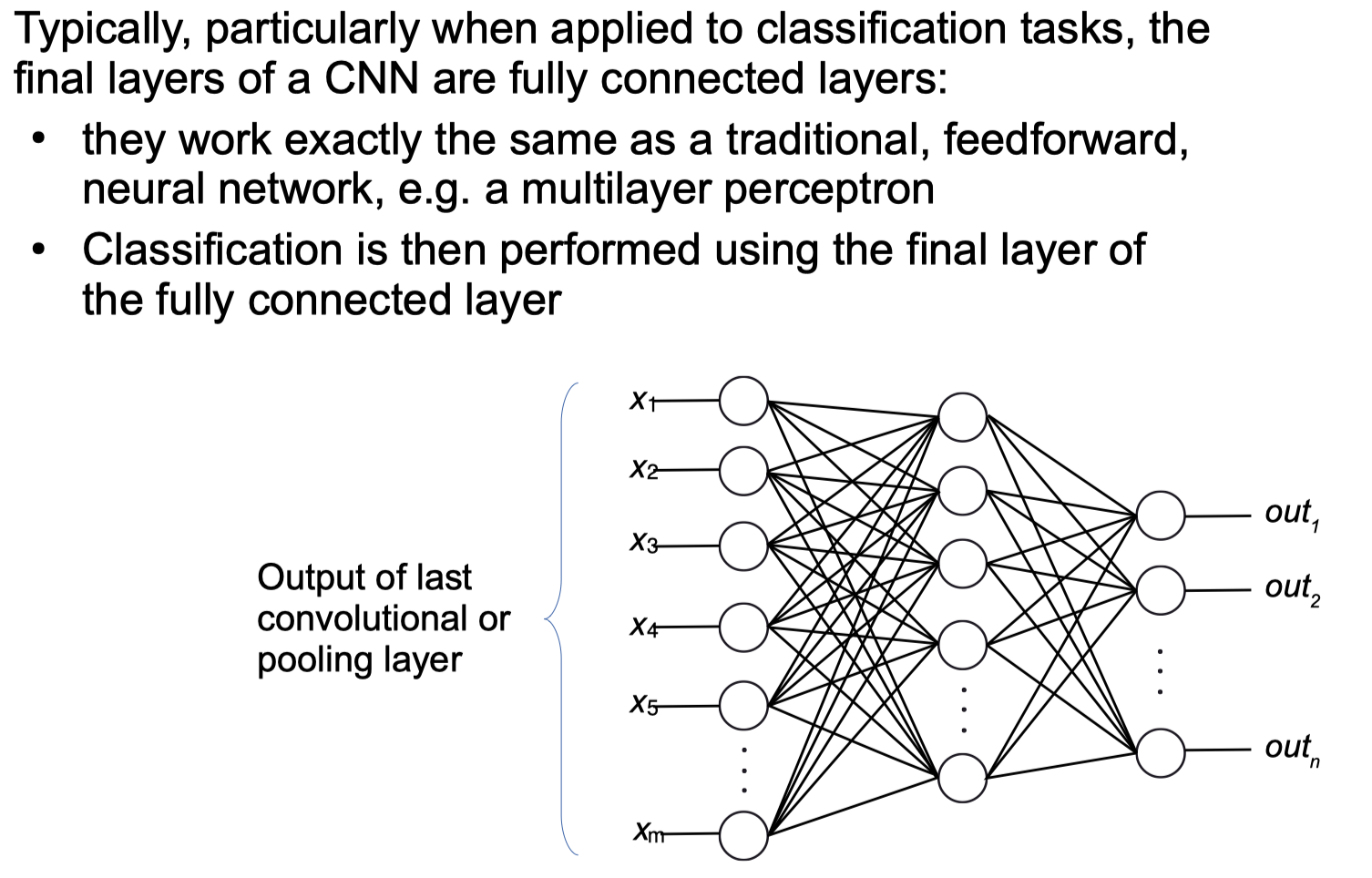
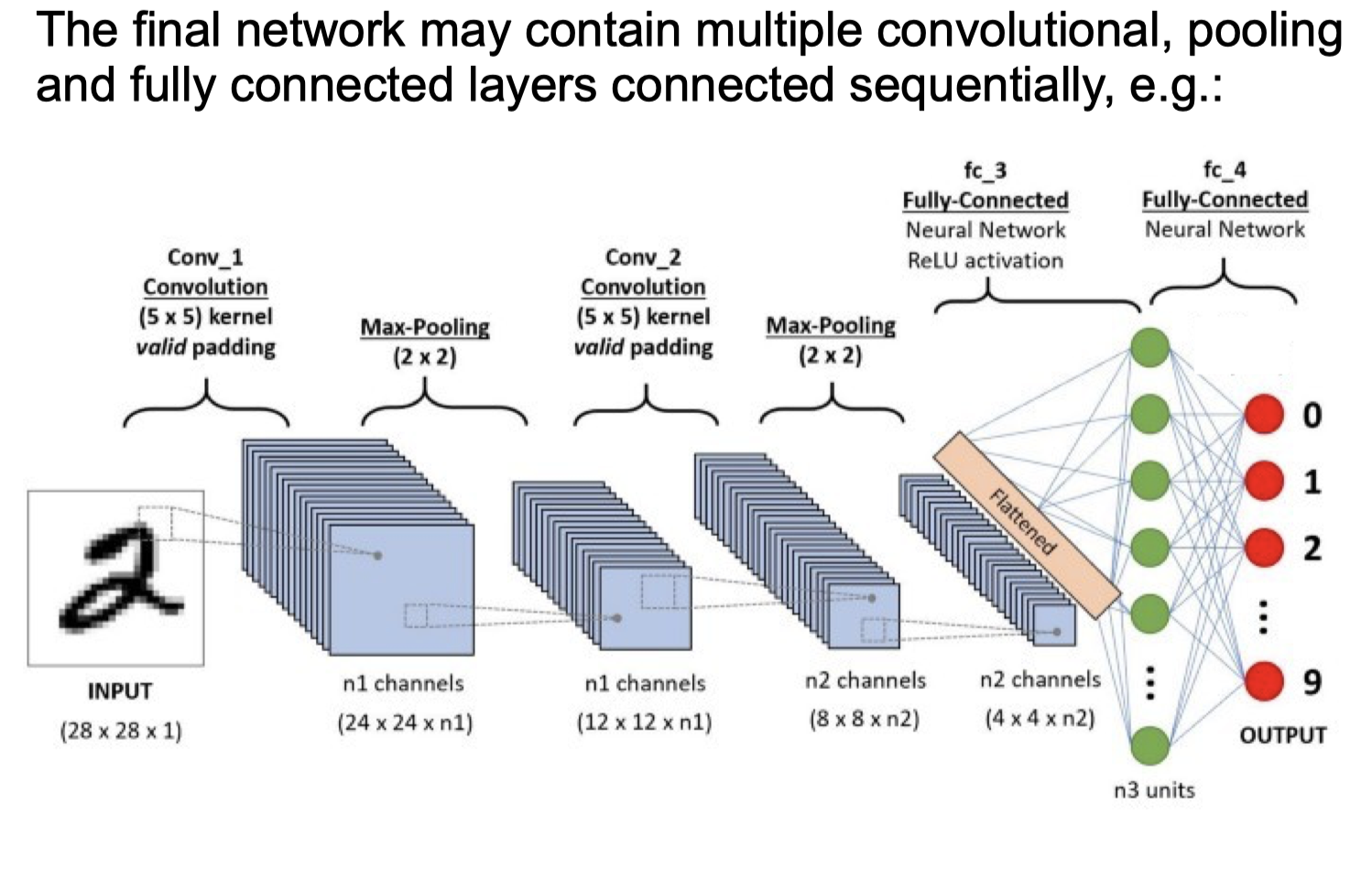
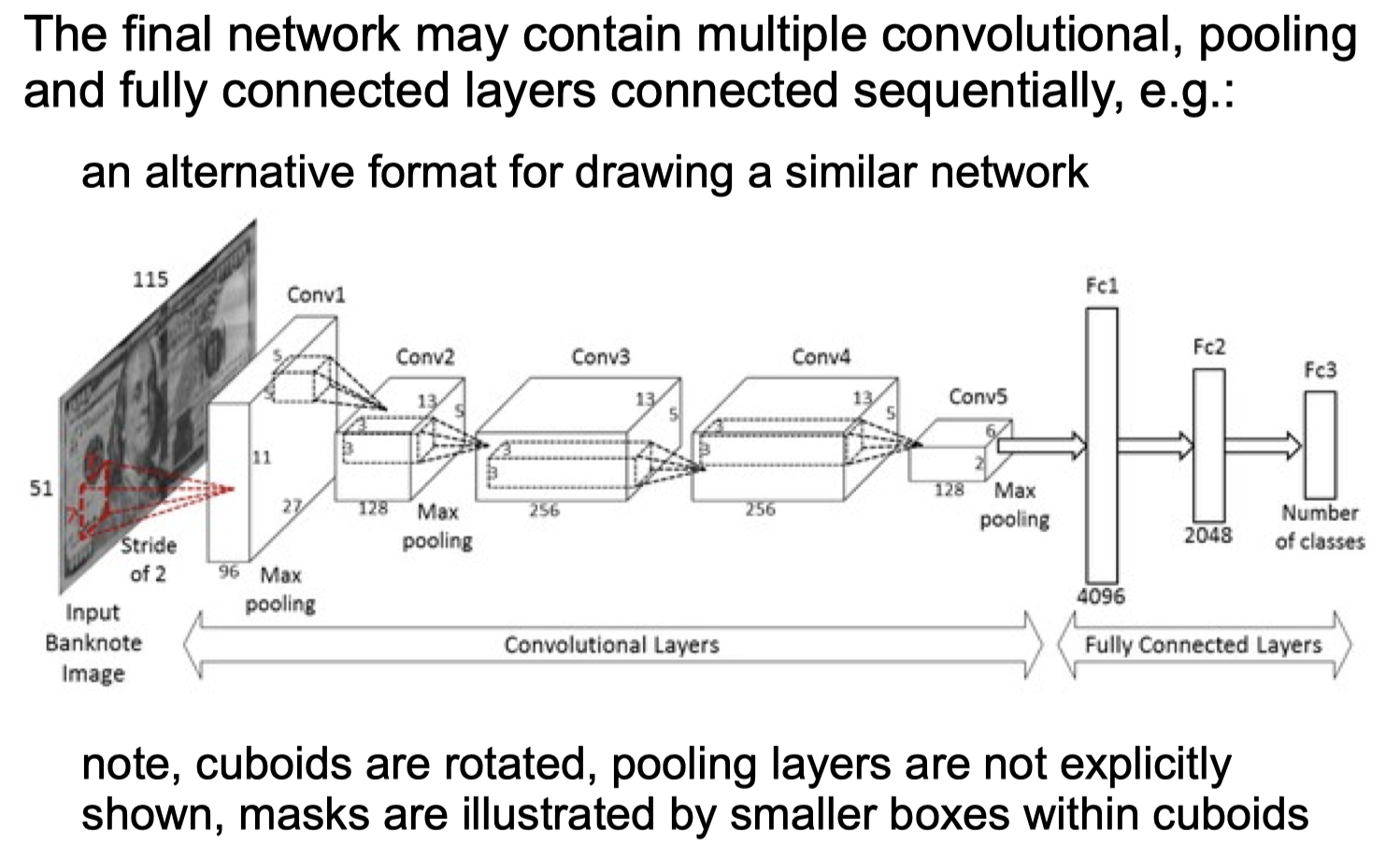
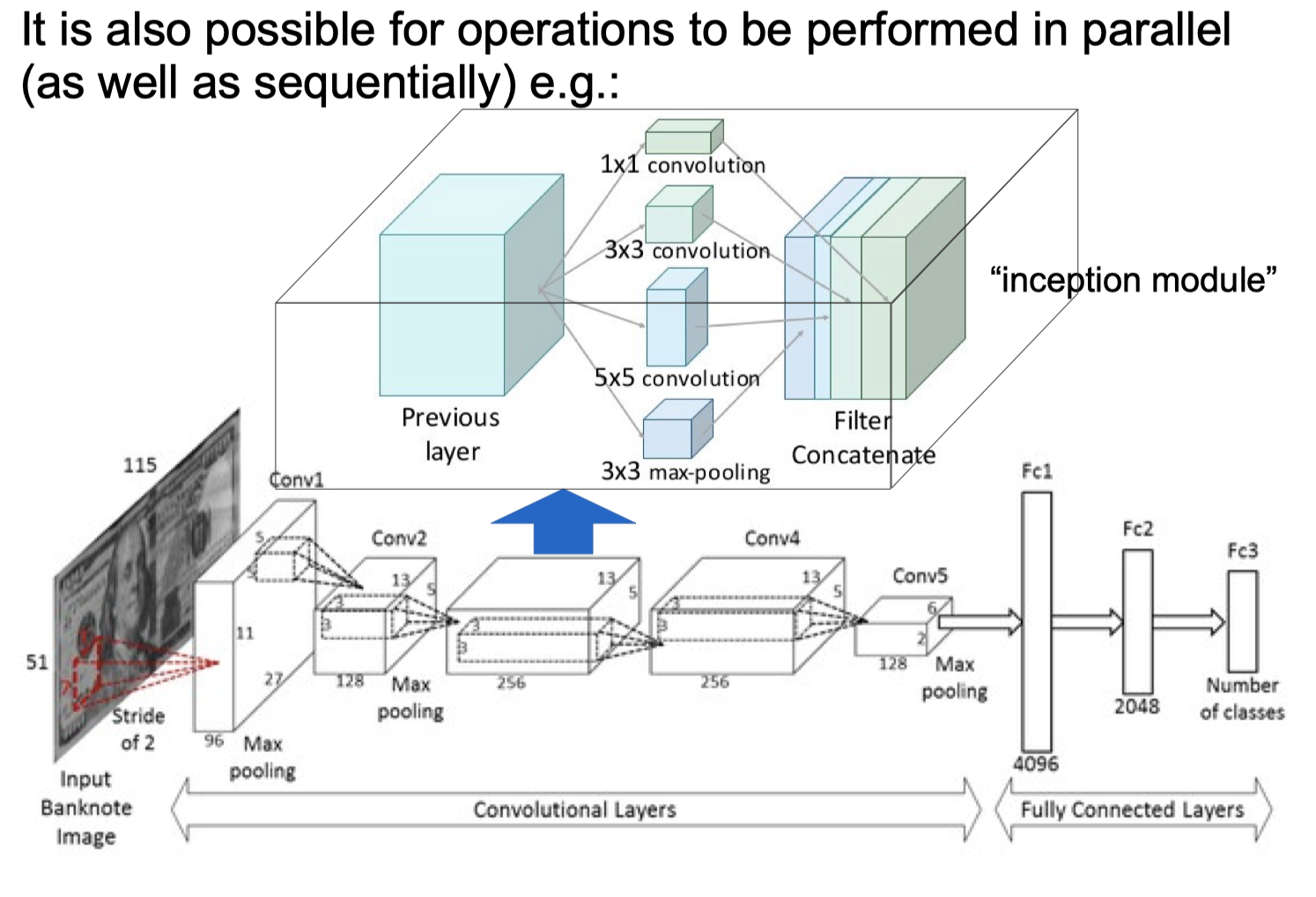
final network
Limitations of Deep NNs
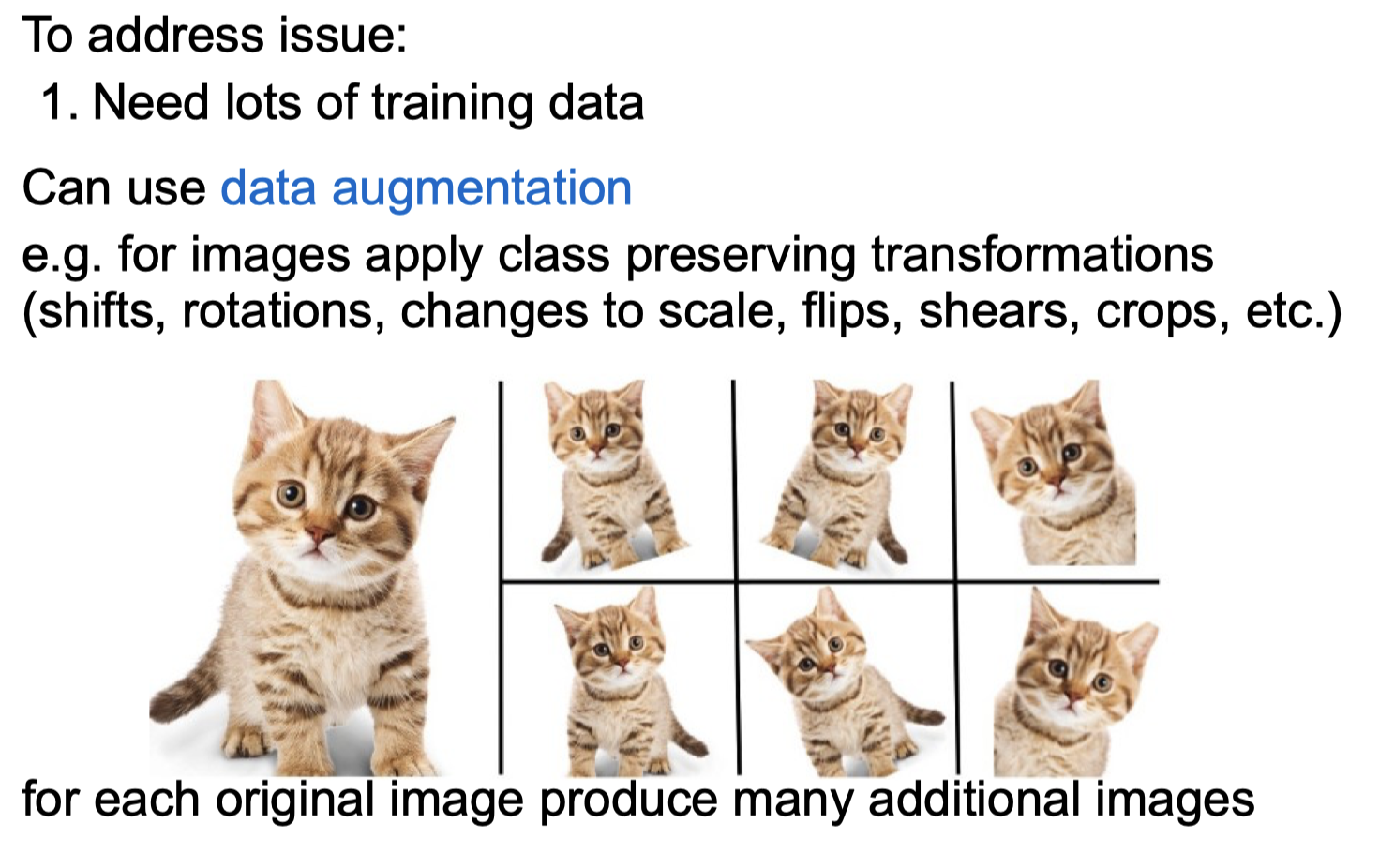
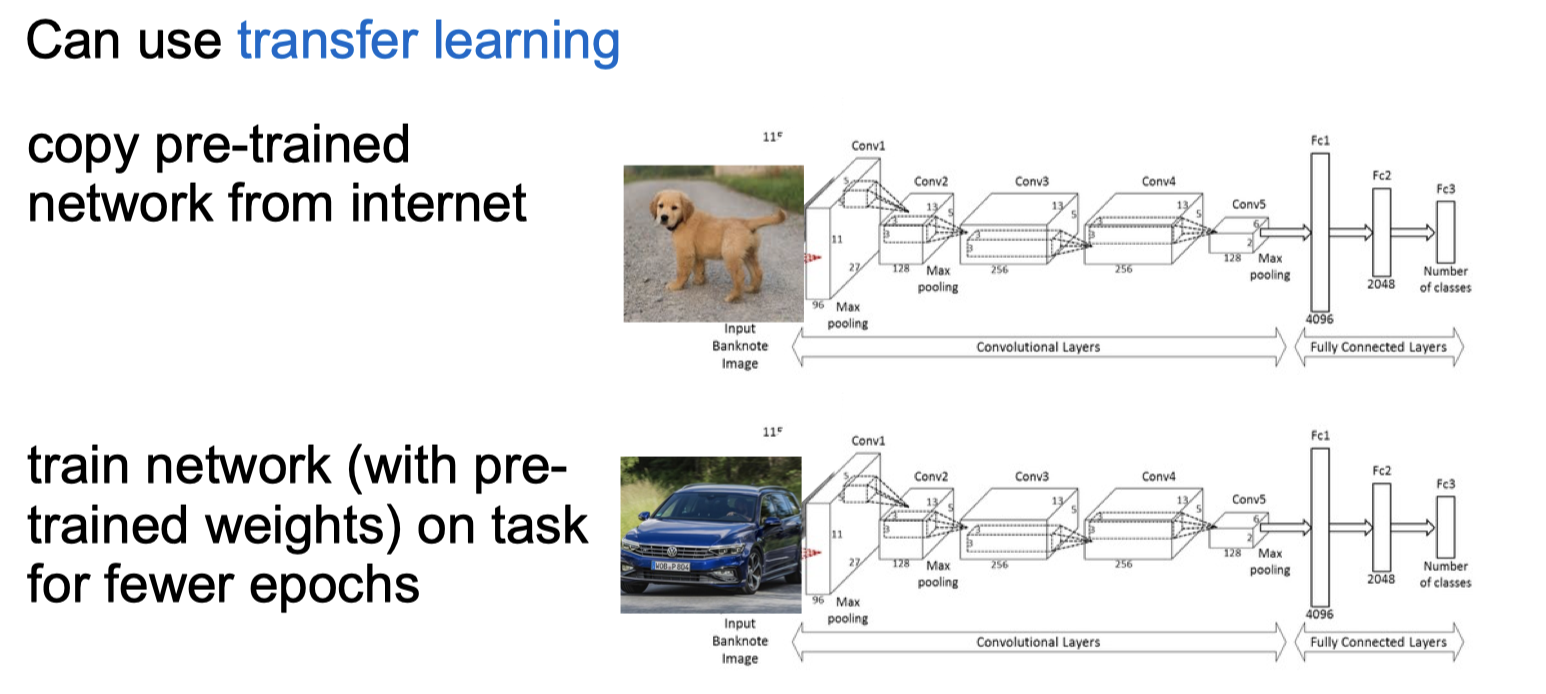
Volume of Training Data
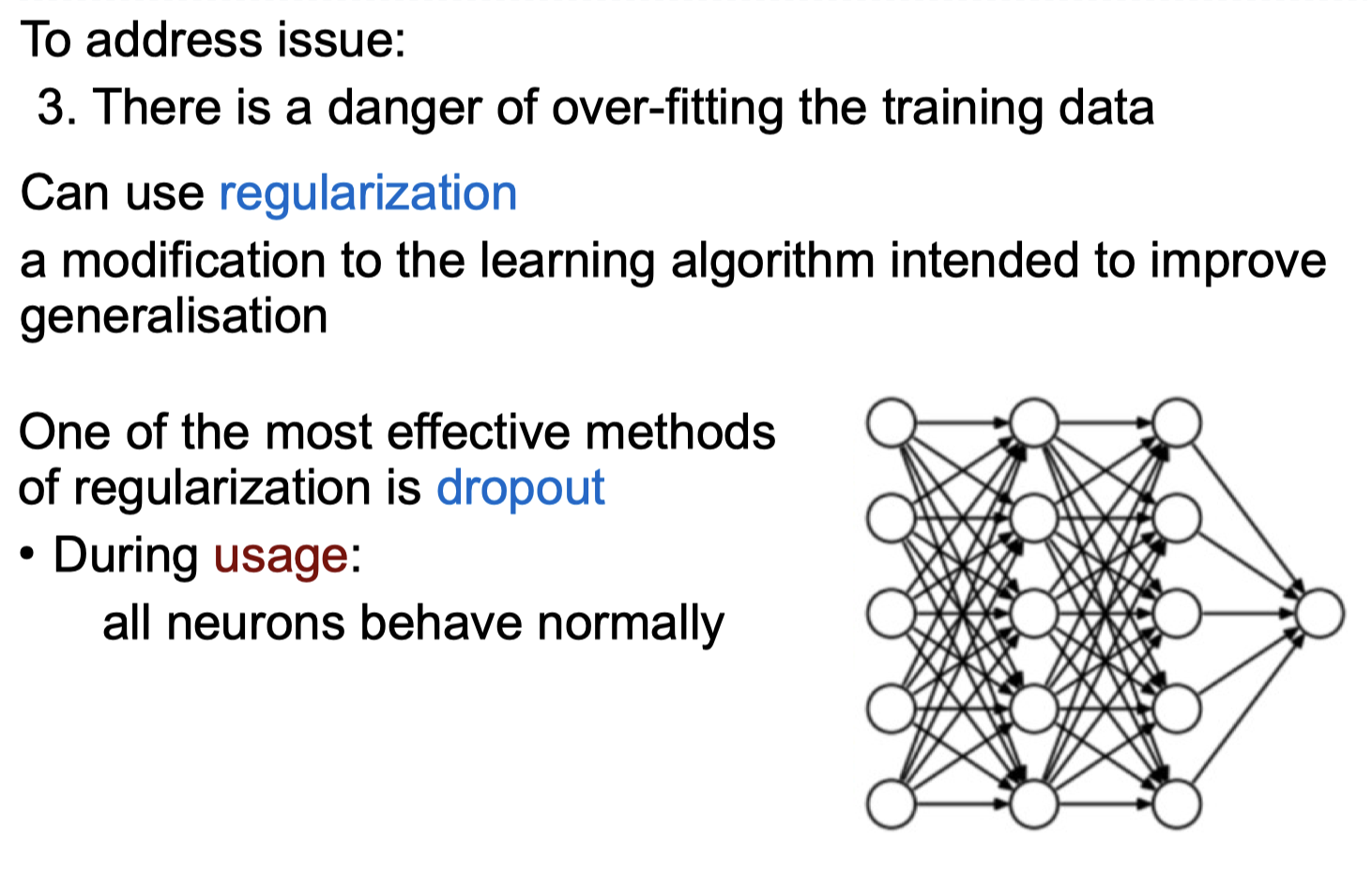
Overfitting
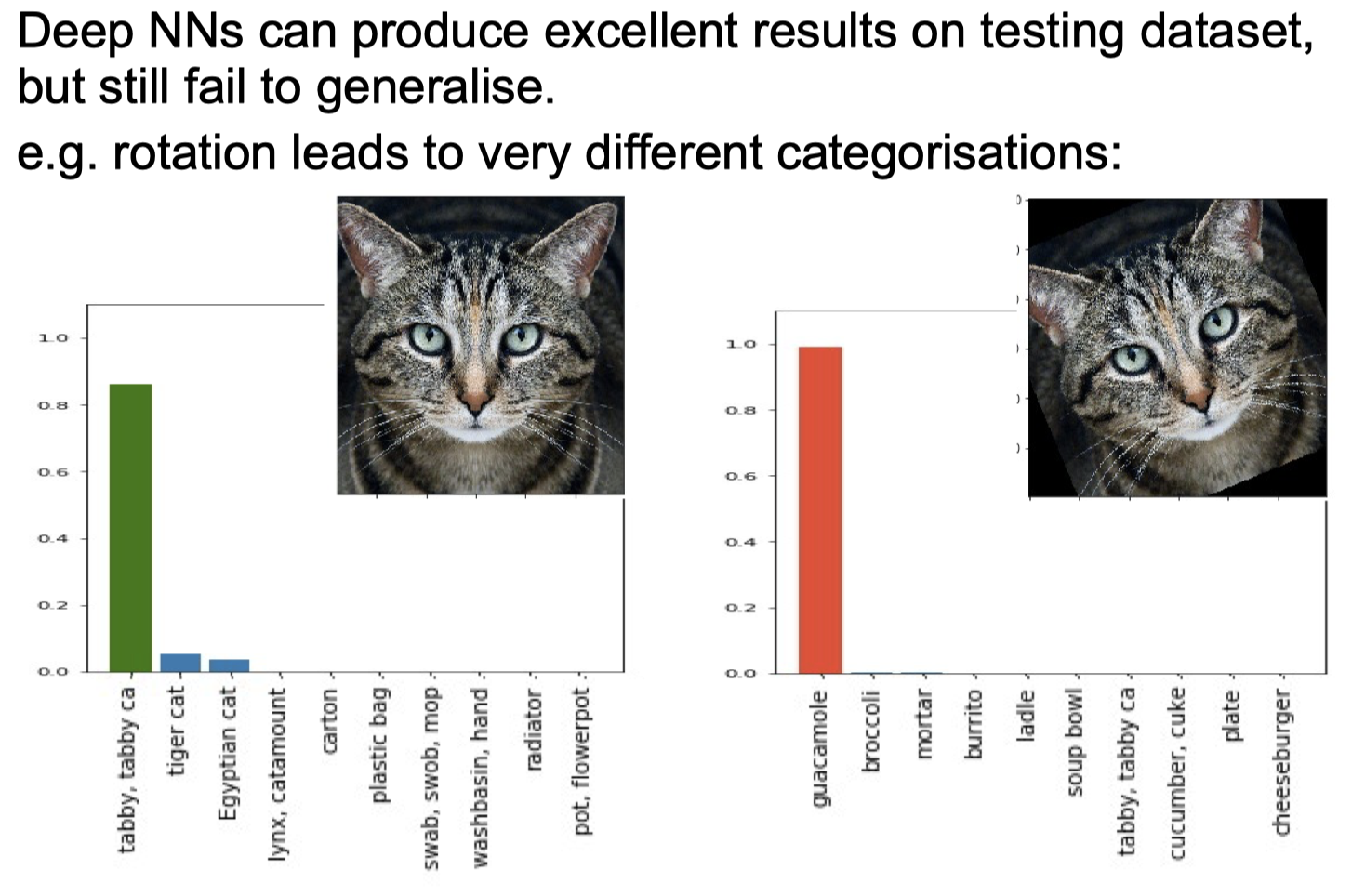
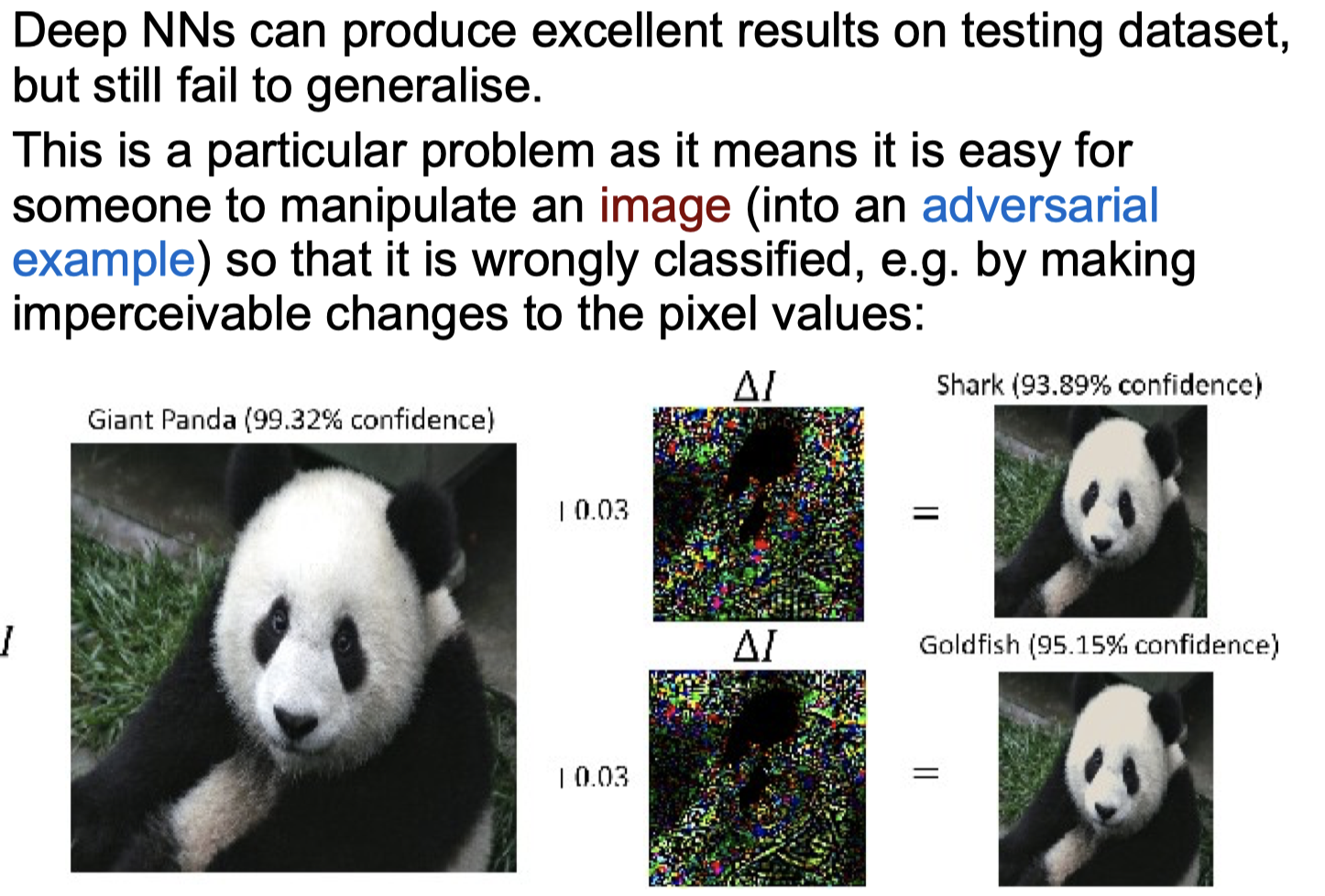
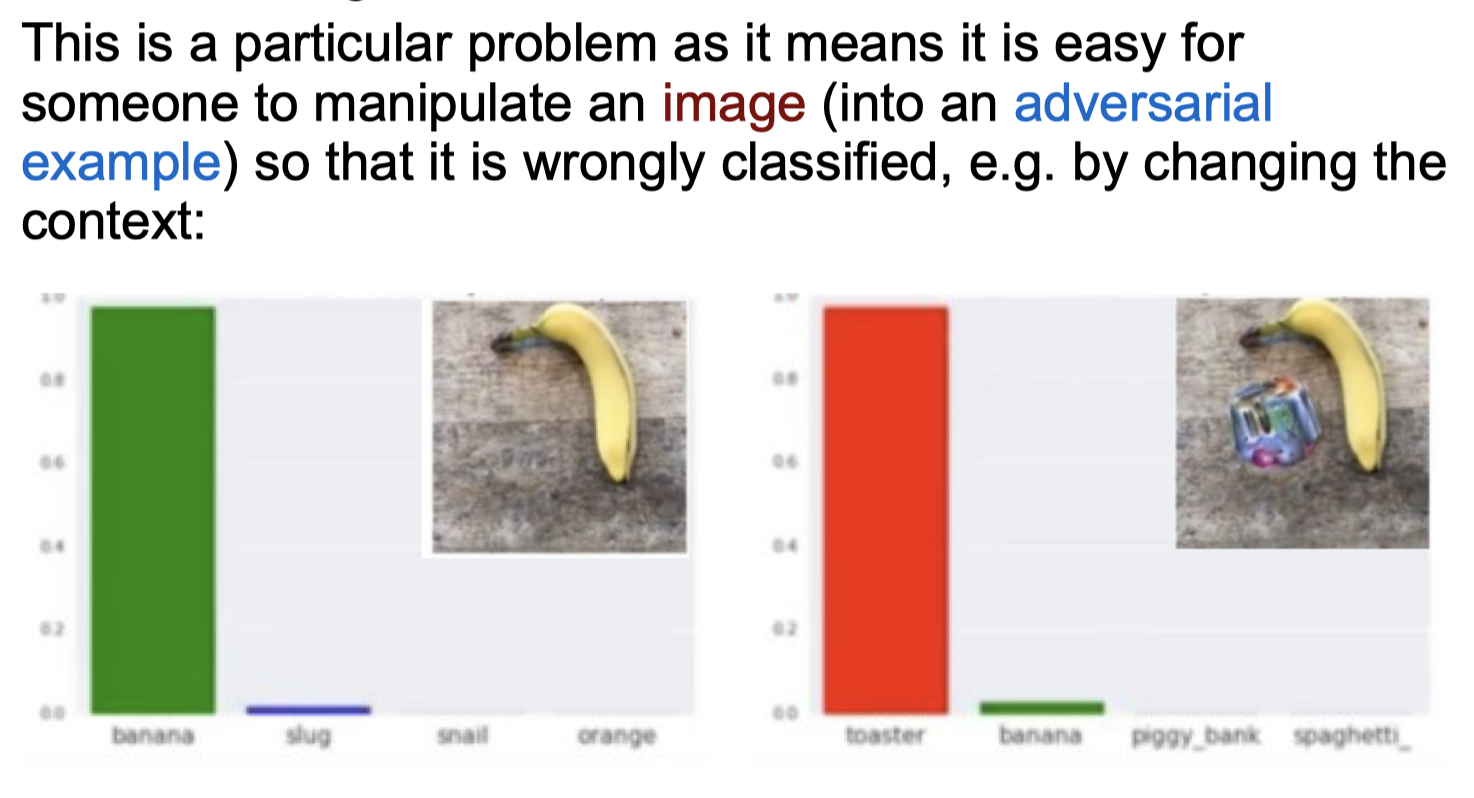
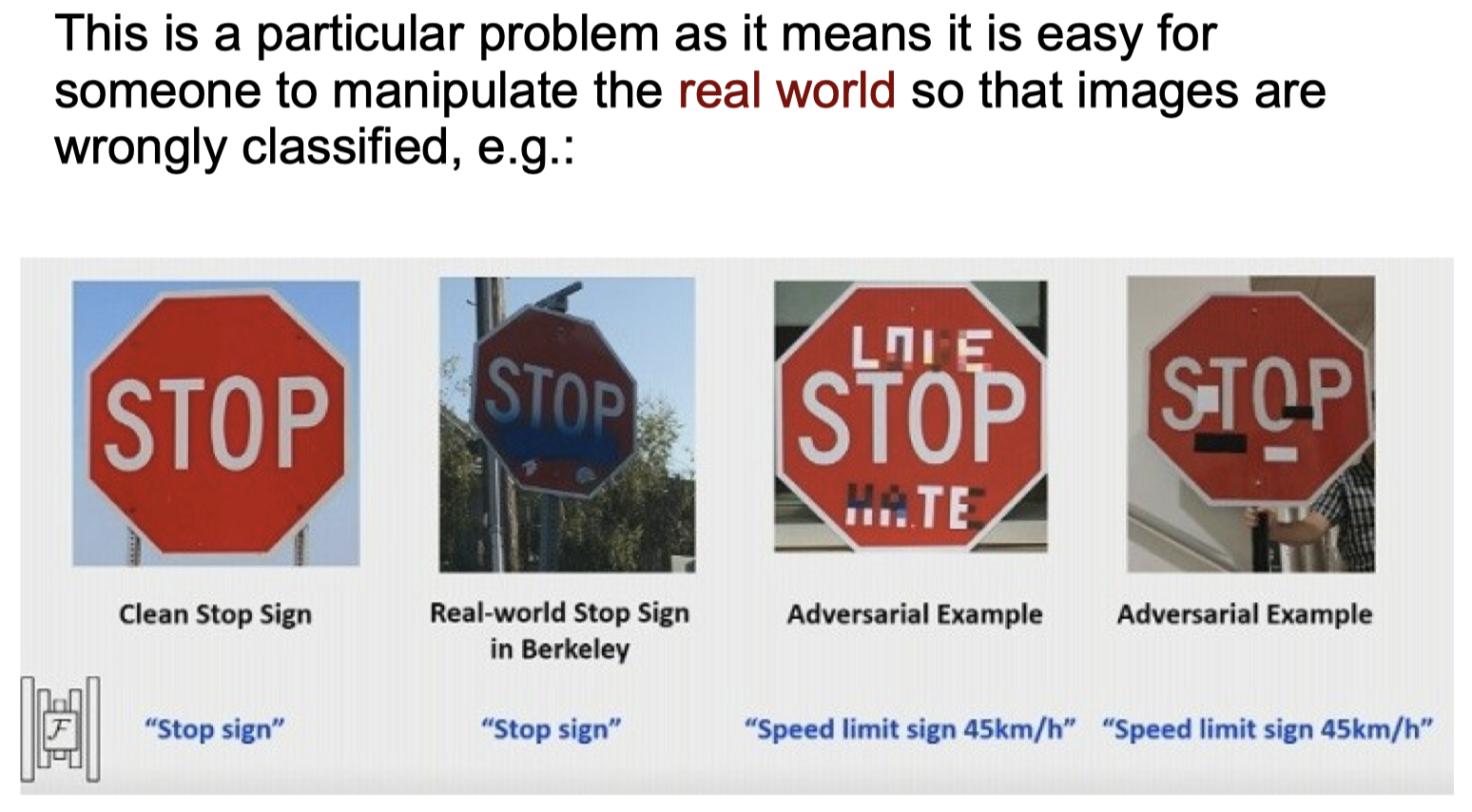
Failure to Generalise
Comments powered by Disqus.